
引言
为了提高火炮的机动性,我们研究开发了plc控制的自动调平系统,这种系统调平时间短,调平精度高,操作简单可靠,对提高火炮的机动性能具有重大意义。平台控制的关键技术是调平算法的选择和自动调平技术的实现。我们使用了2个水平传感器,分别检测前后和左右的倾斜度,而每个支腿的升高都可能引起它们的变化,因此从控制系统来看,这是一个多输入多输出的强耦合的动态过程。
1 简介
某火炮发射车为了提高命中率,在发射火炮前,必须先进行承载平台的调平。承载平台由四条支腿和四个轮胎支撑,为了保证调平后水平度的稳定,调平时首先让轮胎离地,只让四条支腿支撑平台,以克服轮胎变形引起的平面变化。要实现自动调平,就必须使电气控制系统和液压系统在计算机的控制下,成为一个有机的整体,协调、高效、准确地运行。平台控制的关键技术是调平算法的选择和自动调平技术的实现。我们使用了2个水平传感器,分别检测前后和左右的倾斜度,而每个支腿的升高都可能引起它们的变化,因此从控制系统来看,这是一个多输入多输出的强耦合的动态过程[1]。
火炮发射平台应该满足以下要求:
(1) 调平后,平台由四条支腿支撑并与车体脱离;
(2) 调平过程应在短时间内完成,并满足精度指标的要求;
(3) 平台调平后,应进行锁定以保证平台的状态至少24小时不变。
为了提高火炮的机动性,我们研究开发了plc控制的自动调平系统,这种系统调平时间短,调平精度高,操作简单可靠,对提高火炮的机动性能具有重大意义。
2 四点式平台的调平方法
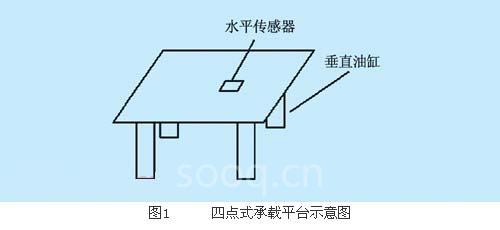
图1是四点式承载平台示意图。按照对称矩形方式,采用4个垂直油缸来支撑平台。这种支撑形式具有稳定性好、抗倾覆能力强等优点,因此被广泛用于机动火炮的发射过程[2]。
调平系统中水平传感器安装如图2所示,水平传感器与平台的一条对角支点连线平行安装。平台有4个支点,平台重心不在两水平传感器交叉点上。如图2所示,2个方向倾角为α和β,传感器夹角为γ,则平台的倾斜度θ可以由α和β合成为:
如果2个方向的控制精度为±δ,则调平后平台的水平误差为:
从(2)式可以得到,控制度δ一定,当γ=90°时,平台的水平误差θ取最小值,因此在大多数的调平系统中,两个传感器都互相垂直安装。此时也就是说,两边的水平控制度应为整个平台水平控制度的,比如要求整个平台的倾斜度为2′,则控制时2个方向的控制度应该为。

根据水平传感器测出的水平倾角可以判断出4个支承点的高低,找出最高点,按照“只升不降”的原则,采用升调平技术,把其他3个支点升高至与最高点处于同一水平面后,调平过程结束。其技术关键是如何根据2个水平倾角决定各支点应该升高的高度,以及采用哪种方法去精确控制各支点升高的高度。
[DividePage:NextPage]
3 调平的plc实现及系统构成
由于plc的高可靠性和接口的简易性,使用plc实现自动调平是一种很好的方法。假定最高支点高度为a,某一支点高度为b,按照升调平方法,则b点需要升高的垂直高度为ab,我们可以用下面的公式计算出该支腿升高ab时所需要的脉冲数n,从而控制该支腿升高的高度,达到调平目的。
式中δp是产生1mm位移的固定脉冲,可以用实验方法精确测出支点升高1mm所需的时间,编程控制加于液压开关的脉冲个数就可实现要求的位移。
本系统选用德国siemens公司的simatic s7-300系列的plc作为主控元件,其结构框图如图3所示。该plc系统包含电源模块、cpu模块、模拟量输入(ai)模块、数字量输入(di)模块和数字量输出(do)模块[3]。通过2个水平传感器检测平台的左右倾角和前后倾角是否满足精度。检测出的倾角信号经相敏整流电路后送给模拟量输入模块。模拟量输入模块用来输入水平检测信号,自动完成a/d转换,然后送给cpu模块,与给定水平度进行比较。cpu模块作为控制器,可以发送各种控制命令,接收并处理各种数据,对整个系统进行协调控制。cpu模块输出的控制量通过数字量输出模块,控制各支腿继电器动作,从而可以控制各支腿的升降,达到调平目的。液电压力开关可以检测各个支腿是否着地,避免虚腿调平。支腿着地时,对应的液电压力开关就会闭合,数字量输入模块对应的输入信号就为高电平;反之,支腿悬空时,对应的输入信号就为低电平。cpu模块根据读入的数字量做出相应的处理。

4 系统的工作过程
本系统的工作过程与系统的软件流程相对应,分为四大模块,分别是:差动着地模块、手动调平模块、自动调平模块、自动撤收模块。根据平台的倾斜度,整个调平过程分为粗调和精调,倾斜度大于5°时,系统粗调,各支腿的动作速度较快;倾斜度小于5°时,系统精调,各支腿的动作速度较慢。其工作过程为:
(1) 启动电机,送启动信号给plc;
(2) plc接收到启动信号,执行程序;
(3) 差动放腿40s,保证所有调平支腿着地;
(4) 根据操作指令,执行调平过程:
·按下“手动调平”键,则根据发出的各支腿升降指令进行调平;
·按下“自动展开”键,系统自动读入水平传感器的倾角,判断倾斜度,自动进行调平。采用升调平技术,根据读入倾角值,判断最高点,计算各支点需要升高的高度,用(4)式计算出所需脉冲数,然后把它对应加到各支腿,控制它们的高度,达到调平目的;
(5) 调平过程结束,发射车可以发射火炮。需要撤收时,按下自动撤收键,系统自动撤收所有调平支腿。
5 技术要求与试验结果
本调平系统的技术参数要求是:
(1) 调平精度≤2′
(2) 调平时间≤3min
(3) 保持稳定状态24h不变
试验证明,该系统达到了指标要求,调平时间小于1min,调平精度在2′以内,稳定性满足要求。本调平系统已调试完成,经过多次打靶实验,命中率比较高,取得了令人满意的效果。
(转载)

