
引言
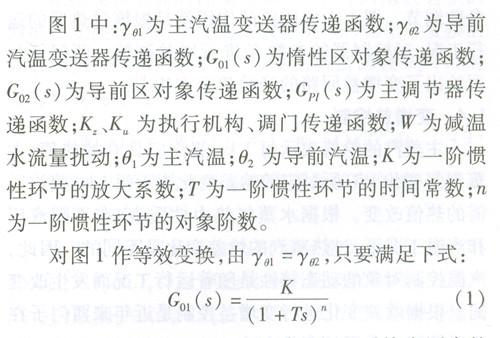
在火电厂控制系统中,主汽温度控制一直是难以解决的问题,这主要是因为汽温控制对象具有大延时、大惯性和时变性的特点,采用常规和简单的控制规律均难以获得较好的调节效果。
目前,工程中常用的汽温控制系统采用的是最基本的串级调节和具有导前微分的双回路控制结构,并在此基础上引人Simith预估和参数自适应等控制策略。但以上控制策略的共同缺点是克服系统的纯滞后性和大惯性环节的能力较弱。为了提高控制精度,本设计采用西门子公司主汽温度控制策略。
一、控制系统特点分析
1.1控制原理
西门子公司汽温控制系统原理如图1所示,这是一个具有导前温度信号的双回路汽温调节系统。内回路采用[(1-PTn)*导前温度]为反馈信号。它相当于一个实际微分环节,动态时使PTn模块的输出近似与主汽温相等,从而改善主汽温调节对象的动态特性;稳态时内回路输出为零,使过热器出口汽温等于给定值。外回路的作用是根据过热器的运行工况,对控制器的参数进行增益调整。
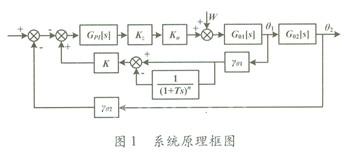
则图l可简化为图2所示框图,即系统由原来的双回路控制系统简化为单回路控制系统。
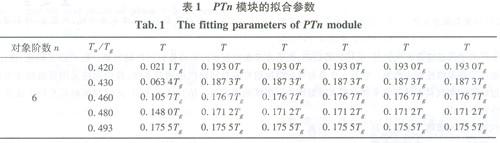
1.2 PTn模块的整定
为了便于对汽温控制系统进行整定,西门子公司给出了PTn 模块的拟合参数表。本文选择n=6 ,如表1所示。表1中:Tu为锅炉减温水流量的线性函数;Tg为锅炉负荷(主汽流量)的线性函数。
[DividePage:NextPage]
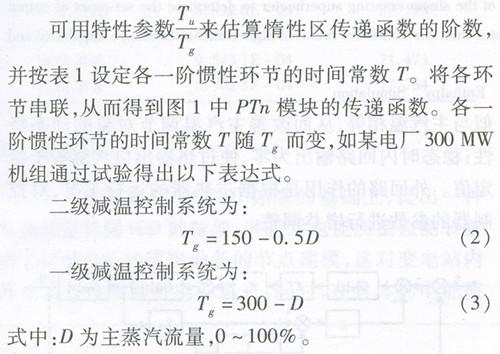
通过减温水阶跃扰动试验,得出主汽温和二级减温器出口汽温(导前汽温)的阶跃响应曲线,再由主汽温和导前汽温响应曲线可估算出惰性区的传递函数。
1.3变增益回路的整定
在不同运行工况下,减温水流量扰动下汽温控制对象的动态特性存在着较大的差异。因此,为了获得较好的调节效果,应在不同工况下进行试验,并采用变参数调节。图1中内回路的作用就是根据过热器的运行工况,对控制器的参数K进行增益调整。西门子公司给出了变增益回路的经验整定方法。
1.4 变增益控制
主蒸汽的烩值表示每1kg蒸汽应具有的热值,主蒸汽每变化1℃所对应的烩差变化表示每1kg蒸汽所需的热值改变。根据水蒸气热力性质表,在不同汽压和汽温工况下,过热蒸汽的烩差变化是不同的。因此,汽温控制对象的动态特性是随着运行工况而发生改变的。根据烩差变化进行变增益控制是近年来西门子在汽温控制中采用较多的方法。
汽温每变化1℃所需的减温水量取决于在不同汽压和汽温下过热蒸汽的烩差变化。在一定的汽压和汽温范围内,增益调整值是烩差的线性函数。
根据减温水作用的区域,取导前汽温作为烩差计算的汽温参数,汽压参数则取主汽压力信号,输人烩值计算表,即可得出汽温每变化1℃的焓差值。
二、仿真研究
本文采用Simulink对西门子公司主汽温度控制策略进行仿真研究川,并与串级汽温控制系统进行比较。仿真结果如图3所示。
%%%%%%%%%%4
由图3可以看出,系统分别在t=150s时加人定值扰动和在,t=300s时加人减温水流量扰动。与传统的串级控制相比,西门子主汽温度控制策略的控制性能具有恢复时间快、振动幅度小的特点。试验结果表明,采用西门子主汽温度控制策略控制主汽温具有很强的抗干扰能力,其控制品质得到很大改善。如果在以上情况下略微调整参数,其控制品质还会得到进一步改善。
总的来说,采用西门子主汽温度控制策略对模型的不确定因素和内外扰动均有很好的适应能力,其控制品质要远优于常规的串级控制。
三、结束语
本文根据过热器的运行工况,通过采用西门子主汽温度控制策略,对控制器的参数进行增益调整,使过热器出口汽温等于给定值。从仿真结果来看,与一般串级汽温调节系统和具有导前微分信号的双回路汽温调节系统相比,西门子主汽温度控制策略具有更好的调节品质。
由于仅针对过热汽温惰性区的传递函数构造数学模型,所以该控制策略受对象特性参数变化的影响较小,系统的鲁棒性较好。由此可见,西门子主汽温度控制策略非常适用于主汽温控制系统中存在大干扰、大延迟、时变性、不确定性和非线性的复杂热工对象。
(转载)

