
引言:
由于拉丝的过程中线径发生变化,线速度也随之变化,每秒通过各级拉丝模线材的体积是不变的,可以得到等式(略), 以此可以计算出各级基础频率。
拉丝机控制系统用于控制4级-9级直进式拉丝机,包括预应力钢丝和各种焊丝的拉丝机,系统开放运行参数,因而具有非常广泛的适应性。
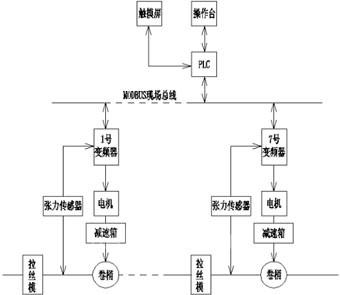
一、系统框图:
二.控制方案:
1.点动逻辑,各个点的单独反点动+各个点的“前联动”。
2.PID控制,PID输入值是各级张力传感器反馈的模拟量,P、I、D和范围参数HMI设定,PID输出值是频率变化量,最后将PID运算结果与各级基础频率整合为目标频率。
3.采用PLC+触摸屏的智能控制方式,所有参数都可以通过触摸屏改变,由PLC处理后,对各个变频器进行控制。
4.配备了相应的按纽及脚踏开关,操作工可以在各拉丝点操作点动以及起停,也可以在操作台进行更复杂的操作。
5.风机、油泵、机械抱闸等外部部件控制可选,模拟量控制方式和MODBUS控制方式可选。
三.自动过程:
1.按下启动按纽后,各级变频器按照设定加速度,均匀加速到设定线速度,收卷采用F3000变频器转矩控制。
2.PLC根据张力信号进行PID运算,以保证运行过程中各级张力恒定。
3.PLC将运算结果,通过MODBUS总线或者DA模块发送给各个变频器,各个变频器根据PLC的指令运行。
4.任何时候按下停止按纽,变频器都会按照设定减速度,均匀减速到0速,然后抱闸致动;任何时候按下急停按纽,变频器输出切断,同时PLC输出抱闸信号,在有断线检测信号时,按急停处理。
四.PID详细说明:
直进式拉丝机控制的核心技术是PID运算,我们在这里采用了比较复杂的动态PID的控制方式,在小功率的拉丝系统中,静态的PID就完全可以满足控制需求了,可以通过改变参数,实现这一转化。
五.等体积计算:
由于拉丝的过程中线径发生变化,线速度也随之变化,每秒通过各级拉丝模线材的体积是不变的,可以得到等式(略), 以此可以计算出各级基础频率。
六、操作说明:
该系统用于4-9台直进式拉丝机的控制,控制方式为MODBUS(模拟量控制可选)。特点是所有参数开放。
1.线径设定
2.速比系数
3.系统设定
4.投切设定
5.监控画面
6.张力监视画面
7.故障显示
8.状态观察
9.内部参数
10.PID设定
11.PID1
12.PID2
13.PID3
14.PID观察
15.PID范围
(转载)

