
概览
激烈的全球化竞争给机械制造商带来压力,他们制造出的机器需要能提高产量,同时降低成本,并满足更多类似的要求,如:提高生产力,提升效率,从而在竞争中脱 颖而出。因此,当今的机械制造商已从仅制造单一功能的机器,转变为设计灵活高效的多功能机器,他们通过采用现代化控制系统配合复杂的运算并将高端电子产品 集成到他们的机械产品中。
机电一体化
机电一体化是一种综合的工业技术,通过将最有效的开发实践和技术融和到精简设计、样机研究和系统发布中,以此来提升整个设计过程。
Kevin Craig博士是伦斯勒理工学院机械工程教授,他认为机电一体化作为工程的准则,是机械工程、电子、控制工程和计算机的协同组合,在设计过程中相互交融。 它涉及了在从复杂决策到物理系统运作等多方面应用。由于这些独特的功能,机电一体化系统依赖于计算机软件。这一规律导致了一个不断发展的趋势,由于设计变 得越加复杂,因此在不同设计团队间的合作越来越必要。

机电一体化开发方式的成功之道
机电一体化系统的发展趋势使得设计的复杂度陡增,迫使不同的设计团队一起工作。在一个机电一体化系统中,每个决策在整个设计中会产生连锁反应。如果 机械团队决定改变材料,意味着改变了机械零件的重量,为了机器有效的运行,会需要对电机的尺寸,甚至是电机的类型做相应的更改。将步进电机更换为伺服电机 会大大增加运算控制的复杂性和对嵌入式系统运算处理性能的要求。在机械、电气和控制工程师间,提高团队交流与和合作是十分重要的,而那些无缝合作工具,能 够帮助工程师们在开发周期的各阶段分享数据和信息,从而使合作和信息交流更为有效。
那些工具实现了虚拟样机(也被称作数字样机),能够在从不同领域结合的仿真技术,即一个模型仿真完整的机器或设备。设计师可以在具化一个物理部件之 前,仿真其机械动力,其中包括质量和摩擦效应、循环次数和单个零件性能。在投入物理样机的花费之前,一个虚拟机样即可以预测和优化设计,并且能评估不同设 计的研究和概念。基于机电一体化的开发方式能降低机器设计的风险、加快设计节奏、提高对客户需求的认知,并简化调试排除故障的过程。因此机电一体化的方法 可以帮助机器制造商在第一时获得最优设计。
从商业角度看,一个虚拟样机不仅在设计阶段增加了许多价值,而且对销售部门在销售过程中与潜在客户沟通提供支持。一个虚拟样机能够帮助销售赢得客户并成功的执行项目。
在报价阶段,一个虚拟机器可以帮助明确要求,确保销售部门准确地理解客户的需求。它提供多种可能,如展示设计特性、解释价值、帮助揭开项目中的未 知,以及风险评估。甚至在售后,一个虚拟样机能够根据客户的要求在已有机器的改进和升级测试中起到作用。另外,客户可以用这个样机来解决他们在运行过程中 遇到的问题。
NI LabVIEW和DS SolidWorks结合
为降低机器设计的成本和风险,达索析统和美国国家仪器合作,为运动控制系统设计师提供机电一体化为核心的虚拟原型工具。
采用LabVIEW和SolidWorks,机器设备制造商可以连接SolidWorks运动分析功能与LabVIEW工业级运动控制程序,创造出 真实的运动控制系统的仿真。采用这种集成的方式,机器制造商还可以开发控制逻辑、动作轨迹描述并将其应用于他们机器的三维CAD模型中,在支付昂贵的加工 成本和物理零件购置费之前,就能在软件中测试机器的运行。采用这种集成的方式,机器设备制造商能在建造物理样机前评估系统行为和性能。他们能够在极端的操 作环境下测试部件的电气性能和实时响应时间,而无须将其单独取出。
因此,一旦CAD模型被创建,机械工程师和控制工程师就能够合力工作。它们能够用虚拟原型工具创造出用于不同设计分析为目的的实际机器的仿真,例如:
•可视化仿真机器操作
•机器加工周期性能评估
•完成精确的压力/扭矩性能需求分析
•运动控制程序及碰撞检测的设计和验证
•物理样机制造前设计优化
•机械/电气相关设计问题确认
使用SolidWorks和LabVIEW,工程师们可以在具化一个物理部件,同时将其连接至一个真实的控制算法之前,模拟其机械动力,其中包括聚 合摩擦力效果、循环次数和单个零件性能。在投入物理模型的花费之前,一个虚拟样机可以预测和优化设计,并且能评估不同设计概念。将运动仿真与CAD结合能 使设计简化,因为仿真用到的信息早已在CAD模型中出现,如密合装配、联轴器、和材料的质量特性。LabVIEW提供了简单易用的高级功能块编程模式对运 动控制系统进行开发,那些只有一些或没有运动控制程序使用经验的使用者都能很容易上手。LabVIEW与SolidWorks的结合,帮助客户开发他们的 运动控制算法,同时能在SolidWorks环境中使用3D CAD来评估系统行为和性能。通过真实的运动控制仿真,它能够在设计时仿真实际的运行情景,以此来确认零件碰撞,输出数据或者图形结果,以此利用CAD模 型实现三维可视化。
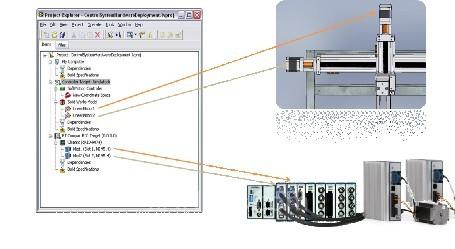
最后工程师们能轻松地将已开发的控制算法部署到嵌入式运动控制平台中,例如NI CompactRIO,它是一个基于FPGA的硬件平台。CompactRIO为独立分散的确定性操作提供了实时嵌入式处理器,以及可以直接连接工业传感 器,激励器和电机的可热插拔的工业I/O模块。有了CompactRIO,工程师能够重新利用在仿真中已测试开发的代码,并将其实现在实际的I/O模块和 电机上。
(转载)

