
随着国内航运产业的快速发展,港口起重机械也越来越多地出现在各个港口、码头。一般的港口起重机械在作业时,会有X轴和Z轴两个运动方向,Z轴上错误的信号会导致货物被提升到过高的位置,造成货物坠落,对人员造成伤害 ,而X轴上的错误信号会导致货物在错误的位置被放置,造成货物坠落,也会对人员造成伤害。 因此,作为危险等级较高的机械,安全控制系统需要对这两个运动方向进行可靠的检测,以避免危险的发生。
针对安全位置检测的需要,皮尔磁提供了使用PSS 3000作为安全位置检测的解决方案,最高可达到安全等级3级和PLd。
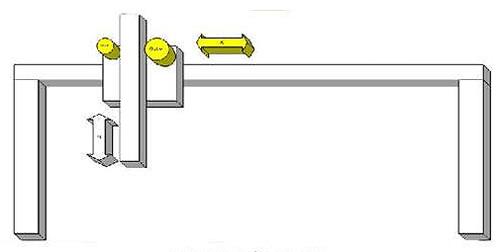
图1 带有提升装置的起重机
图1为一台起重机的示意图。起重机是用于在不同工位之间传输工件的装置。在起重机工作时,需要准确地知道工件被提升或落下时小车在X轴的位置,以避免工件在垂直运动时对人体造成伤害。而起重机垂直方向的运动是由一个第三方提供的NC控制器来控制的。PSS通过安全限位开关(如PSEN系列)来监测Z轴的位置运动,并通过绝对编码器来获取x轴的位置信号,这些都是与NC控制器独立的。PSS只有在起重机的Z轴没有过限(即安全限位开关未被触发)以及绝对值编码器正确地记录了水平位置的情况下起重机才能动作。
显然,无论是限位开关的信号还是绝对值编码器的信号,都是安全相关的,只有准确获得这些信号,才能避免事故的发生,保证操作人员的人身安全。
在使用PSS3000作为安全控制器的应用中,限位开关是测试脉冲双通道接线进入PSS,能够检测输入部分的断线、接地、短路等故障。并且起重机的电源接触器是由PSS控制的带有反馈回路的监测的双通道输出来控制的,确保在触发限位开关时,能够确保有效地切断输出。
而TWK的角度编码器TMN 50_SA 4096R32768 S1 S Nxx用来作为安全的绝对编码器。该编码器由两个冗余、结构相同的系统对于角度进行检测,信号通过CAN端口进行串行通信,每个编码器有两个CAN总线的节点,通过这两个CAN总线的结点,冗余输出到控制系统。
系统的控制器使用的是紧凑型的可编程安全系统PSS 3047-3 ETH-2 CANopen作为控制器。使用Pilz开发的CANopen软件功能包ST SB CANopen Master,PSS 3047可以作为CAN总线的主站。在标准部分使用功能块FB090执行编码器的初始化,FB091和FB092进行两个编码器信号的处理。PSS3047通过FB091和FB092处理之后的编码器数据,检测绝对值编码器信号的外部偏移和内部偏移。外部偏移指的是当前值与参考点之间的偏移,而内部偏移指的两个通道数据之间的偏移。通过安全功能块SB225进行控制,当偏移量超过设定值时,将可靠地切断相应的输出。
通过这样产品设计,一台有两个提升装置的起重机系统,可以由一个和两个TMN的角度编码器来检测,如图2所示。如果是一个有两个运动方向的物料传送系统,也可以通过一个PSS 3074-3 ETH-2 CANopen进行控制,如图3所示。

图2 有两个提升装置的起重机
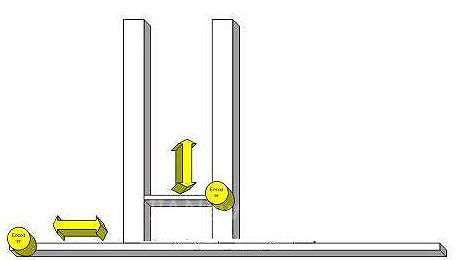
图3 有两个传输方向的托盘物流装置
除了安全距离控制外,在一套PSS系统中,还能使用其他安全功能块,例如急停或者光栅控制块,来控制外围的安全点,作为常规的安全控制器以替代安全继电器。通过与PVIS OPC Server的结合,还能在工作站上能够以图形化的方式显示PSS的诊断信息,如图4所示。
与其他厂商所提供的安全解决方案相比,通过PSS 3000,不仅能够对两个绝对值编码器组成的安全系统进行控制,对于由一个绝对值编码器和一个限位组成的系统,同样也能进行控制。因此,在使用安全控制系统对起重机械进行控制时,不需要对原有系统的机械部分进行更改,并且不需要再使用单个的安全继电器对急停对外围安全点进行控制,减少机械和电气部分的工作量,同时可以有效地简化起重机械的安全控制系统。

(转载)

