
来源:
E-Cart是一种可驾驶的车辆,主要用于演示混合动力汽车的电气性能。位于慕尼黑的英飞凌科技公司汽车系统工程部门最近接到一项开发E-Cart的任务。该车将采用一组庞大的锂离子电池组提供动力,当时开发人员就意识到对其进行带充电平衡的电池管理是绝对必要的。这种情况下必须采用在各节电池之间进行主动能量转移的方式来代替传统的简单充电平衡方案。他们开发的主动充电平衡系统在材料成本与被动方案相当的情况下能提供更优秀的性能(见图1)。

图1:E-Cart原型
电池系统架构
镍镉电池与随后出现的镍氢电池多年来一直主宰着电池市场。锂离子电池是最近才进入市场的,但由于其性能有极大提高,因此其市场份额增长非常迅速。锂离子电池的储能容量非常惊人,但即便如此,单个电池单元的容量不论从电压还是从电流方面仍都太低,不能满足一个混合动力发动机的需要。并联多个电池单元可以增大电池所提供的电流,串联多个电池单元则可以增大电池提供的电压。
电池组装商通常利用一些缩略短语来描述其电池产品,例如“3P50S”代表该电池组中有3个并联的电池单元、50个串联的电池单元。
模块化结构在对包含多个串联电池单元的电池进行管理时是很理想的结构。例如,在一个3P12S的电池阵列中,每12个电池单元串联之后就组成了一个模块(block)。然后,这些电池单元就可通过一块以微控制器为核心的电子电路对其进行管理和平衡。
这样一个电池模块的输出电压取决于串联电池单元的个数和每个电池单元的电压。锂离子电池单元的电压通常在3.3V到3.6V之间,因此一个电池模块的电压约在30V到45V之间。
混合动力车的驱动需要450V左右的直流电源电压。为了根据充电状态来补偿电池单元电压的变化,比较合适的做法是在电池组和发动机之间连接一个DC-DC转换器。这个转换器还可以限制电池组输出的电流。
为确保DC-DC转换器工作在最佳状态,要求电池组电压在150V到300V之间。因此,需要串联5到8个电池模块。
平衡的必要性
如果电压超出允许的范围,锂离子电池单元就很容易损坏(见图2)。如果电压超出了上、下限(以纳米磷酸盐型锂离子电池为例,下限电压为2V,上限电压为3.6V),电池就可能出现不可逆转的损坏。其结果至少是加快电池的自放电速度。电池输出电压在一个很宽的充电状态(SOC)范围内都是稳定的,电压偏离安全范围的风险很小。但在安全范围的两端,充电曲线的起伏相对比较陡峭。因此,为预防起见,必须严密监控电压。

图2:锂离子电池的放电特性(钠米磷酸盐型)
如果电压达到一个临界值,就必需立即停止放电或充电过程。在一个强大的平衡电路的帮助下,相关电池单元的电压可以返回安全范围内。但为达到这一目的,该电路必需能在电池组中任何一个单元的电压开始与其他单元出现差异时马上在各单元之间转移能量。
充电平衡法
1.传统的被动方法:在一般的电池管理系统中,每个电池单元都通过一个开关连接到一个负载电阻。这种被动电路可以对个别被选中的单元放电。但该方法只适用于在充电模式下抑制最强电池单元的电压攀升。为限制功耗,此类电路一般只允许以100mA左右的小电流放电,从而导致充电平衡耗时可高达几小时。
2.主动平衡法:相关资料中有很多种主动平衡法,均需要一个用于转移能量的存储元件。如果用电容来做存储元件,将其与所有电池单元相连就需要庞大的开关阵列。更有效的方法是将能量存储在一个磁场中。该电路中的关键元件是一个变压器。电路原型是由英飞凌的开发小组与VOGT电子元件GmbH公司共同开发的。其作用是:
a. 在电池单元之间转移能量
b. 将多个单独的电池单元电压复接至一个基于地电压的模数转换器(ADC)输入端
该电路是按照回扫变压器原理构造的。这类变压器能够将能量存储在磁场中。其铁氧体磁心中的气隙增大了磁阻,因此可以避免磁心材料出现磁饱和。
该变压器两侧的电路是不同的:
a. 初级线圈与整个电池组相连
b. 次级线圈与每个电池单元相连
该变压器的一种实用模型支持多达12个电池单元。变压器的可能连接数量限制了电池单元的个数。上述原型变压器有28个引脚。
其中的开关采用OptiMOS3系列的MOSFET,它们的导通电阻极低,因此其传导损耗可以忽略不计(见图3)。
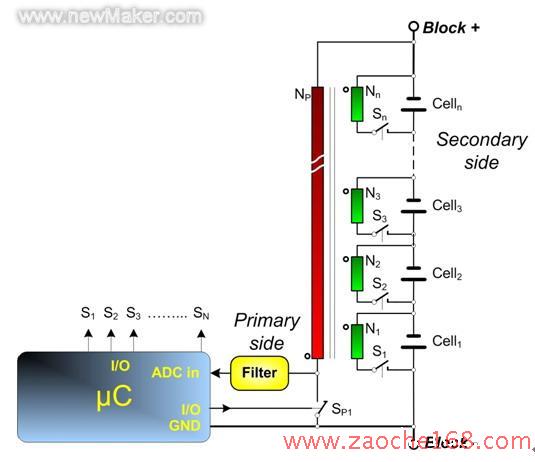
图3:电池管理模块的原理图
图中的每个模块都受英飞凌公司的8位先进微控制器XC886CLM控制。这种微控制器自带闪存程序和一个32KB的数据存储器。此外,它还有两个基于硬件的CAN接口,支持通过公共汽车控制器局域网(CAN)总线协议与下面的处理器负载通信。它还包含一个基于硬件的乘除法单元,可用于加快计算过程。
平衡方法
由于变压器可以双向工作,因此我们可以根据情况采取两种不同的平衡方法。在对所有电池单元进行电压扫描之后(电压扫描的细节将在后面介绍),计算平均值,然后检查电压偏离平均值最大的电池单元。如果其电压低于平均值,就采用底部平衡法(bottom-balancing),如果其电压高于平均值,就采用顶部平衡法(top-balancing)。
1.底部平衡法:图4所示例子就是采用的底部平衡法。扫描发现电池单元2是最弱的单元,必须对其进行增强。
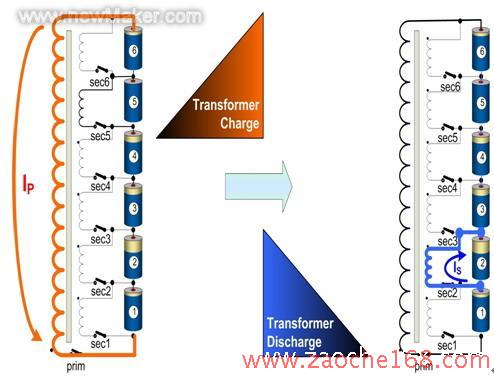
图4:锂离子电池的底部充电平衡原理
此时闭合主开关(“prim”),电池组开始对变压器充电。主开关断开后,变压器存储的能量就可以转移至选定的电池单元。相应的次级(“sec”)开关——在本例中是开关sec2——闭合后,就开始能量转移。
每个周期均包含两个主动脉冲和一个暂停。在本例中,40毫秒的周期转换为频率就是25kHz。在设计变压器时,其工作频段应在20kHz以上,以避免出现人类听觉频率范围内可感知的啸叫噪音。这种声音是由变压器铁氧体磁心的磁致伸缩导致的。
尤其是当某个电池单元的电压已经达到SoC的下限时,底部平衡法能够帮助延长整个电池组的工作时间。只要电池组提供的电流低于平均平衡电流,车辆就能继续工作,直到最后一块电池单元也被耗尽。
2.顶部平衡法:如果某个电池单元的电压高于其他单元,那么就需要将其中的能量导出,这在充电模式下尤其必要。如果不进行平衡,充电过程在第一块电池单元充满之后就不得不立即停止。采用平衡之后则可以通过保持所有电池单元的电压相等而避免发生过早停止充电的情况。
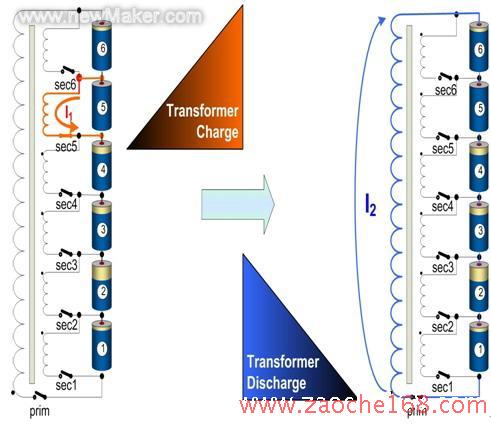
图5:锂离子电池的顶部充电平衡原理
图5给出了顶部平衡模式下的能量流动情况。在电压扫描之后,发现电池单元5是整个电池组中电压最高的单元。此时闭合开关sec5,电流从电池流向变压器。由于自感的存在,电流随时间线性增大。而由于自感是变压器的一个固有特性,因此开关的导通时间就决定了能够达到的最大电流值。电池单元中转移出的能量以磁场的形式得到存储。在开关sec5断开后,必须闭合主开关。此时,变压器就从储能模式进入了能量输出模式。能量通过巨大的初级线圈送入整个电池组。
顶部平衡法中的电流和时序条件与底部平衡法非常类似,只是顺序和电流的方向与底部平衡法相反。
平衡功率和电压扫描
按照英飞凌E-Cart中的原型配置,平均平衡电流可达5A,比被动平衡法的电流高50倍。在5A的平衡电流下,整个模块的功耗仅2W,因此无需专门的冷却措施,并且进一步改善了系统的能量平衡。
为了管理每个电池单元的充电状态,必须测量它们各自的电压。由于只有单元1在微控制器的ADC范围内,因此模块中其他单元的电压无法直接测量。一种可能的方案是采用一组差分放大器阵列,而且它们必须支持整个电池模块的电压。
下文中描述的方法只需增加很少量的额外硬件就能测量所有电池单元的电压。在该方法中,主要任务是进行充电平衡的变压器同时也被用做一个复用器。
在电压扫描模式中没有使用变压器的回扫模式。当S1到Sn这些开关中有一个闭合时,与其相连的电池单元的电压就转换到变压器的所有绕组中。
在经过一个离散滤波器的简单预处理之后,被测信号就被送入微控制器的ADC输入端口。开关S1到Sn中的某个开关闭合时所产生的测量脉冲持续时间可能非常短,实际导通时间为4us。因此,通过这个脉冲存储至变压器中的能量很少。而且无论如何在开关断开之后,存储在磁场中的能量都会通过初级晶体管流回整个电池模块。因此电池模块的能量多少并不受影响。在对所有电池单元进行完一个周期的扫描之后,系统又回到初始状态。
本文小结
只有拥有一套优秀的电池管理系统才能充分发挥新型锂离子电池所具备的优势。主动充电平衡系统的性能远远优于传统的被动方法,而相对简单的变压器则有助于保持较低的材料成本。
(转载)

