
随着计算机的发展,有限元法因其精度高、收敛性好、使用方便等优点逐渐被应用到板簧的设计中。钢板弹簧是汽车中广泛应用的弹性元件,刚度是其重要的物理参量。因此,在产品试制出来之前,如何更准确的计算其实际刚度就成为大家共同关心的问题。
传统的计算方法,如“共同曲率法”和“集中载荷法”等均存在一定的局限性,在计算中往往需要加入经验修正系数来调整计算结果。邹海荣等应用有限元法分析了某渐变刚度钢板弹簧的异常断裂问题,提出了避免此种断裂的改进措施。胡玉梅等针对某汽车后悬架的钢板弹簧应用Ansys软件分析了其静态强度特性,给出了钢板弹簧在不同载荷作用下的应力分布,计算结果与试验符合的较好。谷安涛则讨论了应用有限元法设计钢板弹簧的一般流程,给出了设计的示例。
有限元法的最大优点之一就是可以仿真设计对象的实际工作状态,因而可以部分代替试验,指导精确设计。汽车钢板弹簧存在非线性和迟滞特性。应用有限元法进行分析时需要考虑大变形及接触,即需要同时考虑几何非线性和状态非线性,这将使得计算不容易收敛,因而需要较高的求解技巧及分析策略。
本文采用Nastran的非线性分析模块分析了某钢板弹簧的刚度特性,讨论了摩擦对其性能的影响,其分析流程及结果可以为同类型产品的设计提供参考。
2 钢板弹簧刚度的计算方法
传统的计算方法有“共同曲率法”和“集中载荷法”。此外,国内学者郭孔辉针对共同曲率法中存在的固有缺陷,提出了一种称为主片分析法的计算方法,田光宇等则针对集中载荷法的固有缺陷,提出了改进的集中载荷法。这些方法的出发点都是把板簧各片看成是等截面的悬臂梁,不考虑板簧各片之间的摩擦和板簧变形过程中的大变形特性,采用经典梁公式计算第1叶片的端点挠度,进而求得板簧的刚度。
2.1共同曲率法
共同曲率法由前苏联的帕尔希洛夫斯基提出,其基本假设为板簧受载后各叶片在任一截面上都有相同的曲率,即把整个板簧看成是一变截面梁,由此推出对称板簧的刚度计算公式如下:

2.2集中载荷法
集中载荷法的基本假设为板簧各叶片仅在端部相互接触,即假定第i片与第i-1片之间仅有端部的一个接触点,接触力为Pi,并且在接触点处两相邻叶片的挠度相等。其中P1为第1片所受外载荷。因此,系统中的未知力为P2,P3,⋯,Pn共n-1个,由接触点处挠度相等可得到n-1个方程,求解此方程组可得到未知作用力P2,P3,⋯,Pn,再根据第1片所受载荷求出第1片的端点挠度,进而可求得板簧的刚度。板簧刚度的计算公式如下:

2.3主片分析法
共同曲率法假设板簧受载后各叶片在任意横截面上都有相同的曲率,这一假设中存在一个明显与事实不相符的地方,即各片自由端均不可能存在集中弯矩,因此也就不可能与上一片同一截面处曲率相等。为此,主片分析法做出了如下假设。
a.每片板簧分为约束部分与非约束部分,第i片板簧的约束部分与非约束部分的定义如图1所示。

b.板簧各片在非约束部分向下自由变形,在约束部分符合共同曲率假设,即各截面上与上一片在此区段内的曲率相同。
基于以上假设,可得板簧刚度计算公式如下:

式中各符号意义与前述相同,其中an+2=an+1=l1。
2.4改进的集中载荷法
集中载荷法假定板簧每片仅在端部相互接触,而实际上板簧片内各点也可能互相接触,基于此种想法,改进的集中载荷法提出了如下假设。
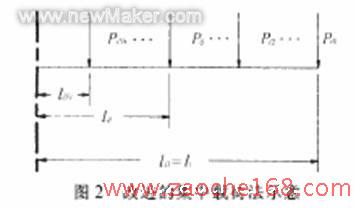
a.各片之间不仅仅在端点处存在相互作用,而是存在若干个接触点,如图2所示,第i片与第i-1片之间存在Ni个接触点,记这些点到板簧对称面的距离为lij,j=1,2,⋯,Ni。
b.第i片与第i-1片之间仅在预先设定的Ni个接触点相互作用有集中力,记为Pi1,Pi2,PiNi,如图2所示。
与集中载荷法类似,系统中共有个 未知力,由
未知力,由 个接触点处的挠度相等可以得到
个接触点处的挠度相等可以得到 个方程,求解此方程组即可得到各个未知力的大小。根据第1片上的受力情况即可求得第1片的片端挠度,进而可以求得板簧的刚度。
个方程,求解此方程组即可得到各个未知力的大小。根据第1片上的受力情况即可求得第1片的片端挠度,进而可以求得板簧的刚度。
与集中载荷法不同,用此法计算出来的结果不能保证各个未知力均大于或等于零(即接触点之间只能存在压力),为此,需要运用迭代算法来解决这一问题。
以上各种计算方法的共同点就是把板簧各片近似等效为悬臂梁,而对各片之间的接触采用不同的方法进行模拟。实际上,板簧工作时存在大变形特性,用线性悬臂梁模拟存在一定偏差,而且板簧各片间的接触模拟方式也较粗糙。采用有限元法计算板簧刚度就可以克服上述缺点,使得计算精度更高,并且对变截面簧、少片簧和渐变刚度板簧都可以很好的求出其工作刚度,具有实际的意义。
3 钢板弹簧刚度的有限元分析
3.1求解步骤
有限元法求解板簧刚度的步骤如下。
a.按照板簧的设计尺寸构建板簧的三维实体几何模型。
b.采用三维实体单元对板簧各片进行有限元网格划分,赋予材料参数。
c.用接触单元定义板簧各片之间的接触。
d.按照板簧的实际工作状态对模型施加载荷与约束。
e.提交计算,得到板簧的载荷-变形曲线,对于恒刚度多片簧,对此曲线进行线性拟合,即可得出钢板弹簧刚度的数值。
运用有限元法求解板簧刚度时应注意如下几点:一是正确合理的约束,二是叶片间摩擦的处理,即如何选取合适的摩擦系数,三是选择合适的接触刚度。
3.2几何模型
计算对象为某型10片等厚度对称钢板弹簧,其右半部分如图3所示。
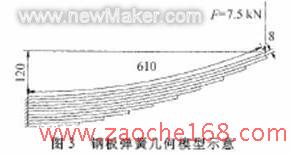
表1给出了板簧装配后的几何尺寸。装配后的总成弧高为120mm。

3.3有限元模型及载荷边界条件
由于板簧的对称性,只取其一半进行分析,采用8节点6面体单元划分网格,划分好的有限元模型如图4所示。

在对称面上施加固定约束,在板簧悬臂端施加7.5kN的集中载荷,板簧各片之间的接触采用slideline线-线接触单元模拟,如图5所示。为清楚起见,各片之间的接触单元没有画出。

3.4 求解及后处理
把整个载荷分为30个子载荷步施加到模型中去,采用Nastran的非线性求解器sol106进行求解,根据各载荷步的垂直载荷及垂直位移即可得到板簧的载荷-位移曲线,进而可以得到板簧的刚度。
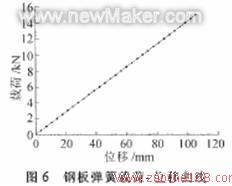
曲线由曲线数据进行线性拟合可得到此板簧的刚度为0.1419kN/mm。
3.5结果讨论
分别采用共同曲率法、集中载荷法、主片分析法计算了此钢板弹簧的刚度,并与有限元计算结果进行对比(见表2)。由结果可见,传统计算方法和有限元法计算得到的结果相差不大,但均存在一定差异,这是由于3种传统方法在考虑叶片之间的接触时与实际情况存在一定偏差,并且未能考虑钢板弹簧的大变形特性以及钢板弹簧各片之间的摩擦所致。

4 关于摩擦的讨论
如何准确有效地模拟摩擦是非常关键的问题,而实际板簧中各个叶片之间的摩擦因数与其使用条件、接触面之间的状态等均有关系,其准确值往往很难得到。因此,有必要考查不同摩擦因数对计算结果的影响,以明确摩擦在钢板弹簧弹性行为中的作用。图7为分别取摩擦因数μ=0和μ=0.3(动摩擦因数取0.2)时,钢板弹簧加载、卸载过程中的载荷-变形曲线。
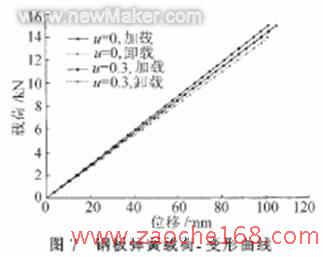
可见,当摩擦因数μ=0时,加载与卸载曲线相互重合,此时板簧的加载刚度与卸载刚度值相等,都为板簧的实际刚度。
当摩擦因数不为零时,加载与卸载路径产生了差别,相同载荷卸载时所产生的位移要大于加载时的情况,并且两者均值与摩擦因数为零时的位移值相等。由此,可以得知摩擦使得板簧的加载刚度大于卸载刚度,两者的平均刚度即板簧的实际刚度可以等效为没有摩擦时的情况。
在卸载的初始阶段,随着载荷的减小,板簧位移几乎不发生变化,这是由于在采用库仑摩擦模型时,在载荷减小的瞬间,叶片之间的动摩擦转变为静摩擦,各片相对位置不再发生变化;随着载荷的进一步减小,叶片间的最大静摩擦力不足以抵消板簧的回弹力与外载荷之差时,叶片之间的静摩擦又转变成了动摩擦,继续卸载,板簧才沿卸载曲线继续变形,直至载荷为零。
板簧实际工作中承受动态载荷,因此需要考查其动态刚度特性。为此,在板簧悬臂端施加了一个正弦激励,以考查其动态性能,其表达式为:
f=3.75cos(0.04πt)+11.25
模型的约束仍采用计算静刚度时的约束,把静态载荷替换为上述的动载荷,采用Nastran的非线性瞬态求解器sol129得到板簧的瞬态位移响应(图8)。

由图8可以看出,在正弦激励作用下,板簧的位移响应有一个明显的滞后,并且在加载、卸载状态变化时,均存在一个位移相对变化很小的平台期,这都是因为摩擦存在的缘故。图9为承受动载荷时板簧的载荷-位移曲线。
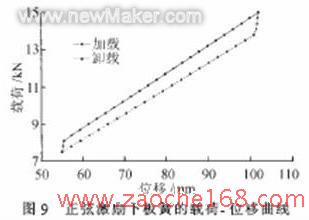
由图9可见,在每一次循环中,外力功之和并不为零,而是图中迟滞曲线所包围的面积,据此可以得出钢板弹簧在此载荷作用下的等效阻尼,此处不再详述。
最后,应指出的是,在此仅讨论叶片之间的摩擦对刚度特性的影响。通常,静摩擦因数可取0.2~0.3,动摩擦因数取0.15~0.2,但对于不同的钢板弹簧,其叶片之间的摩擦因数应由试验确定。
5 结束语
采用有限元法分析了钢板弹簧的刚度特性,并讨论摩擦的影响,得到以下结论。
a.采用有限元法可以准确的得到钢板弹簧的刚度特性。与传统的方法相比,有限元法能更精确的反映钢板弹簧叶片之间的接触和摩擦等细节。
b.摩擦特性影响钢板弹簧的动刚度,使之表现出迟滞特性,但对钢板弹簧的静刚度影响不大。
相关阅读:
(转载)

