
电动助力转向系统(ElectronicPowerSteeringSystem,EPS)是汽车电子化发展的成果之一,在各国汽车制造业中得到了普遍重视。EPS属于一种动力转向系统,比传统动力转向系统具有更高的可控性,能较好地解决汽车转向“轻”和“灵”的矛盾,因此有广泛的应用前景[1]。对其进行性能仿真研究、建模及施加控制是两大关键问题[2]。
基于ADAMS软件的虚拟样机技术,可把汽车视为一个由多个相互连接的、彼此能够相对运动的多体系统,其运动学及动力学仿真与以往通常用几个自由度的质量—阻尼刚体(振动)数学模型相比,计算描述能够更加真实地反映整车结构和整车性能,也比其他方法更为直接方便[3]。
由于EPS控制运算法则的复杂性和整车模型的自由度过多这两个原因,造成仅仅使用一种软件进行基于整车的EPS系统性能分析是比较困难的。本文以某多功能商务车为对象,采用ADAMS/Car建立整车系统多体动力学模型,在Matlab中建立EPS控制系统,应用MATLAB与ADAMS软件相联合,将电动助力转向控制系统与整车模型相结合,采ADAMS/Controls提供的接口使机械子系统和控制子系统之间形成一个闭合控制回路,进行机电一体化的复杂实时仿真。利用两种软件各自的优点,解决了整车模型自由度过多和EPS控制系统运算法则过于复杂,两者共处的问题,应用于实际,可以大大减少车辆控制系统的开发周期和成本。
一、整车多体模型
合适的车辆动力学模型是进行联合仿真的前提,建立的多体模型应能反映实车结构,为此在ADAMS/Car中建立车辆整体动力学系统模型,需遵循以下原则:
(1)在建立动力学模型时尽量减少对重要部分的简化,在不影响系统精确程度的前提下对次要部分进行简化,尽量减少自由度数,提高求解效率。
(2)除了轮胎、阻尼元件、弹性元件、橡胶元件以外,其余零件认为是刚体,在仿真分析过程中不考虑它们的变形;簧载质量看作一个具有六个自由度的刚体。
(3)对于刚体之间的连接柔性作适当的简化,用线性弹性橡胶衬套(bushing)来模拟实际工况下的动力学特性;各运动副内的摩擦力忽略不计。
(4)由于发动机模块及制动系模块仅用于控制车速,本文采用了ADAMS/Car数据库中内置的发动机及制动系模块;同时动力传递系统进行相应简化,只考虑半轴以后的动力传递,即驱动力矩直接加在驱动半轴上。
使用ADAMS/Car创建的某商务车整车多体动力学模型如图1所示,由悬架、车身、转向、稳定杆、制动、传动、轮胎、动力总成等8个子系统组成。具体建模过程及各部件的相关参数和具体数值见文献[3]:
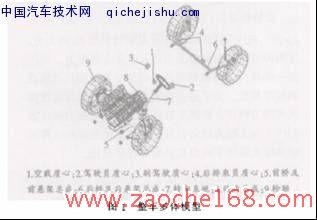
(1)转向系主要包括方向盘、转向轴、转向管柱、转向传动轴、横拉杆、齿轮齿条转向器等。在ADAMS中按照相应的连接关系,加上相应的约束副即可构建完成。建立转向系模型时,应将转向柱断开为两部分,加一旋转副,保证它们之间可绕其轴向相对转动,并在断开处再加一扭簧(torsion),输入扭簧的刚度即可达到扭杆弹簧的效果,以便准确地测量出仿真过程中转向盘施加的转矩;在转向齿条上加一力元素,表示助力的大小,助力函数初始值设置为0,利用VARVAL函数实时读入MATLAB环境中EPS控制系统的计算值。
(2)车身系统:为简化建模,将车辆乘员同车身集成为一个模型,采用离散的质点代替连续体。车身模型由五部分组成:空载车辆质点、驾驶员质点、副驾驶员质点、乘员质点(4人)。通过定义副驾驶员质点和乘员质点的质量可以分别模拟1~6个乘员时的承载工况,通过定义各质点质心的位置可以模拟不同的质量分布。
(3)前桥及前悬架总成:前悬架为麦弗逊独立悬架,前桥为转向桥,前桥及前悬架总成主要由副车架、控制臂、车轮轴承、减振器、螺旋弹簧、传动轴、限位块和等转速万向节组成。
(4)后桥及后悬架总成:后桥为扭力梁式支持桥,采用非独立悬架,后桥及后悬架总成主要由后桥V形横梁、后滑柱总成、螺旋弹簧、双向作用筒式减振器、后轴纵臂、轮毂轴座和限位块组成。
(5)轮胎:研究分析的车辆轮胎型号为215/175R15,轮胎绕中心轴的转动惯量由三线摆实验测得为0.87kg·m2,轮胎模型采用UA模型,该模型所需参数较少,主要有:侧偏刚度、外倾刚度、垂直刚度、纵向刚度、滚动阻力系数和垂向阻尼系数等,这种轮胎模型比较适合进行理论分析。
二、EPS控制系统设计
电动助力转向系统的基本组成包括转矩传感器、车速传感器、电子控制单元(ECU)、电动机和减速机构等。它是一种直接依靠电动机提供辅助转矩的助力转向系统,转矩传感器与转向轴(小齿轮轴)连接在一起。当驾驶员转动转向盘时,转向盘转过一个角度,与此同时,位于转向盘和电动机之间的转矩传感器检测到转向转矩。转矩传感器的电信号与车速传感器的电信号共同传给控制单元ECU,ECU根据助力特性确定出助力电流的大小和电动机的旋转方向,而后由电动机提供相应的转矩,即助力矩。助力矩的方向同轮胎、转向机构的摩擦产生的转矩方向相反,减轻了驾驶员施加在转向盘上的力矩[4]。
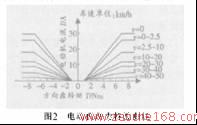
助力特性根据转向驱动力矩与助力矩之间应具备的理想关系;电动机输出转矩与电流间存在的线性关系,采用直线型助力特性[4],如图2所示。图中助力特性曲线可以分成三个区:无助力区、助力变化区和助力不变区。直线型助力特点是在助力变化区,助力与转向盘转矩成线性关系。该助力特性曲线可用以下函数表示:
式中,I为电动机的目标电流;Imax为电动机的最大工作电流;Tsw为转向盘输入力矩;k(v)为助力特性曲线的梯度,随车速增加而减小;Td0为转向系统开始助力时的转向盘输入力矩;Tdmax为转向系统提供最大助力时的转向盘输入力矩。
Td0和Tdmax与驾驶员主观感觉有关,事先可以根据设计者和驾驶员对转向轻便性和路感的要求,并通过试验来确定。本文根据原车液压助力特性曲线,及参考有关文献资料,在台架试验的基础上初步取Td0=1.0Nm,Tdmax=7.0Nm。
(一)助力控制过程
对助力电动机输出转矩的控制是电动助力转向系统研究的重点。由于电动机的输出转矩是由其工作电流决定的,因此助力控制可归结为对电动机电流的控制,其控制输入为车速信号和转向柱扭矩信号(即作用于转向盘的转向驱动力矩)。考虑到车辆建模过程中的非线性及控制输入量与输出量间也存在非线性映射关系,本文提出了基于理想助力特性曲线的PID控制策略,采用了增量式数字PID控制器来实现对电动机电流的控制[5,6]。
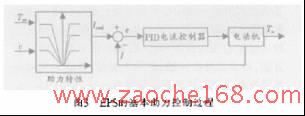
EPS的助力过程:控制器根据转向盘转矩传感器的输出Tsw和车速传感器的输出v,由助力特性确定电动机的目标电流Icmd,然后由电流控制器控制电动机的电流I,使电动机输出目标助力(矩)。因此,EPS的控制要解决两个问题:一是确定电动机的目标电流;二是跟踪目标电流。其基本助力控制过程如图3所示。电动机的目标电流是根据助力特性曲线确定的,在同一转向盘力矩输入下,电动机的目标电流随车速的增加而降低,电流愈小则助力愈小,这样能较好地兼顾轻便性与路感的要求。
三、联合仿真系统设计
首先,在ADMAS/Car环境中定义状态变量,以汽车质心处的前进车速v、转向盘转矩Tsw、汽车横摆角速度ωr及侧向加速度ay作为系统的输出量,将控制输入量定为转向齿条上的作用力及转向盘转角θh。接着,通过ADMAS/Controls模块将整车多体动力学模型以非线性被控对象形式输出至Matlab环境中,输出到Matlab中的整车多体动力学模型会自动以ADAMS_sub子系统表示。最后,在Matlab/Simulink环境下,在ADAMS_sub子系统基础上,建立以目标电流为控制参数的EPS联合仿真控制系统[7](见图4)。
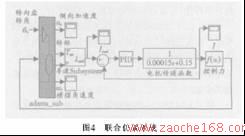
EPS控制模块的输入是Tsw和v,调整PID控制器的比例环节参数kp、积分环节参数ki和微分环节参数kd。参数确定后(经多次迭代,确定kp=80;ki=0.02;kd=10),PID控制系统便能确定电动机电流I的大小,进而即可确定电机输出力矩及齿条上的助力。利用这一闭环的仿真控制过程,调整参数直到得到满意的控制精度。为了进一步证明所设计控制器在提高汽车助力特性方面的有效性,文中把有助力转向器的汽车与无助力转向器的汽车在采用相同的计算过程和输入条件下的仿真结果进行了对比。
四、系统的联合仿真
设汽车以80km/h的速度作近似于正弦曲线的行驶。正弦运动的周期为6.5s,最大侧向加速度为0.45g,仿真结果见图5。由图5显见,转向盘转矩、横摆角速度、侧向加速度的变化情况均为正弦波的形状,这与实车试验中的变化情况相吻合,证明了系统具有良好的跟随性。装有EPS的汽车,其转向盘转矩小于没有EPS的汽车,表明EPS系统有较好的助力特性,能保持一定的转向盘力,给驾驶者以合适的路感,满足了高速行驶的汽车应具有较大转向灵敏度的要求,同时也说明电动助力转向系统对提高汽车操纵稳定性方面有一定的积极作用。

加上EPS助力后方向盘上所需施加的转向驱动力矩明显降低了。这说明采用PID控制的EPS系统能根据车速和方向盘转矩的不同决定是否助力以及助力的大小,达到了对电动机助力的智能控制,基本解决了高速行驶时对保持路感的要求,提高了汽车的操纵稳定性,也证明了本文所建模型的正确性和可控性。
五、结论
本文对具有EPS装置的汽车,应用Matlab与ADAMS两个软件,进行了联合控制仿真研究。采用ADAMS/Car进行汽车多体系统动力学建模,可以建立比较精确的车辆多体模型,尽量减少模型的简化,使得车辆各部分的运动学和动力学响应同实际情况差别不大。通过定义输入输出接口,在Matlab下建立EPS控制系统模型,将电动助力转向控制系统与整车多体模型相结合,应用Matlab与ADAMS软件的各自优点,实现了机电联合控制仿真。可以方便地单独修改机械系统参数和控制系统控制策略,比较不同控制策略对系统性能影响的优劣,更加符合机电一体化的设计要求,是一种有效的设计和分析方法。结果表明本文所提出的动力学模型、控制策略和联合仿真算法是正确、有效的,为今后进一步从事这方面的研究提供了一定参考。基于该模型还可进行其他控制系统的研究,并为ABS/ASR/ACC/EPS等多个控制系统的集成奠定了基础。
(转载)

