
汽车的操纵稳定性包含相互联系的两个部分,一是操纵性,一是稳定性。操纵性是指汽车能够确切地响应驾驶员转向指令的能力,稳定性是指汽车受到外界挠动后恢复原来运动状态的能力。
汽车的操纵稳定性直接影响汽车驾驶的操纵方便程度、汽车行驶速度的提高汽车动力性的发挥和汽车运输生产率的提高,而且也是决定高速汽车安全行驶的一个主要性能。本文介绍键图方法特点的同时,分析键图模型建立及应用Simulink与键图模型相结合对汽车操纵稳定性的仿真。

2 键图理论的基本原理
在每个系统中,相互作用的子系统之间有功率的传递,键合图以此为依据建立系统模型,系统间传递功率的地方即为通口;键合图中有4种状态变量为势e(t)、流f(t)、动量p(t)和变位q(t),通常我们把动量p(t)和变位q(t)称为能量变量,势e(t)和流f(t)称为功率变量。表1 给出了各种不同能量范畴的功率和能量变量。
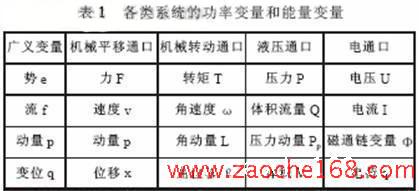
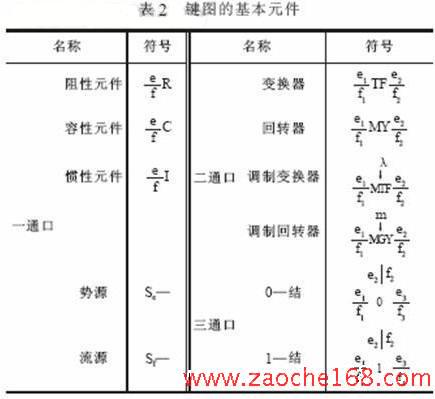
表2 给出了键合图的基本元件。
3 电磁式助力转向系统的结构和组成
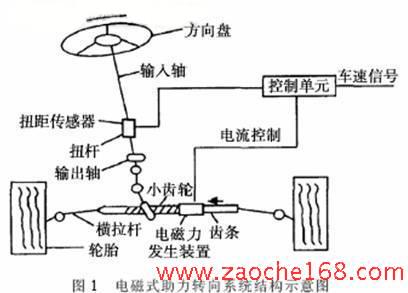
电磁式助力转向系统主要由转矩传感器、车速传感器、控制单元、电磁力发生装置等组成。在操纵方向盘时,控制单元根据转矩传感器输出的转向转矩信号及车速传感器输出的车速信号调节电磁力发生装置供电电流的大小,以获得适当的转向助力,从而保证车辆在任何工况下转向都有较理想的操纵稳定性和转向轻便性,即在原地操舵及低速转向轻便灵敏,在高速下转动方向盘不会丧失路感。
汽车助力转向系统有液压式、电液式、电动式和电磁式4种。其中电磁式助力转向系统是一种结构更简单,且性能更优的新型结构,其组成如图1所示。
4 汽车电磁式助力转向系统模型的建立
在建模过程中,我们把汽车简化为只具有侧向移动和横摆运动的线性二自由度的汽车模型;同时将转向系统的转向机构向转向柱简化,把系统中各构件绕其中心的转动惯量等效为绕转向柱的转动惯量,并以等效阻尼系数代替各连接铰或运动副的助力系数之和,转矩传感器可以看成是一个刚度为Ks的扭力杆。简化后的转向系统如图2中所示。
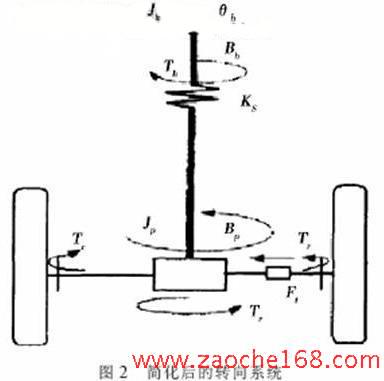
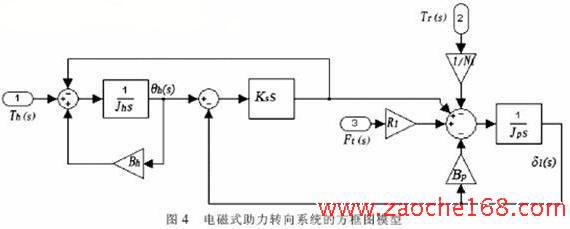
图中:θh是方向盘转角,Jh是方向盘的转动惯量,Bh是方向盘的阻尼系数,Th是作用在方向盘上的力矩,Jp是折合到转向柱的转动惯量,Bp是折合到转向柱的阻尼系数,Tr′是路面对主销的回正力矩作用到转向柱上的力矩,Ft是电磁力发生装置产生的助力,Tr是路面作用于主销的回正力矩。根据键图理论建立模型的基本原则可得到简化后的转向系统的键图模型,见图3。
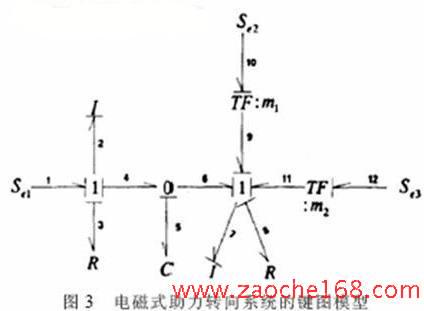
根据键合图元件与方框图的的对应关系,可由系统的键图模型建立出与图3相对应的汽车电磁式助力转向系统的方框图模型如图4。
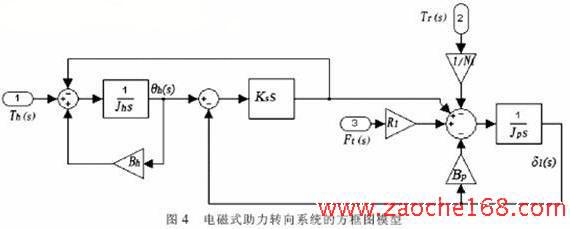
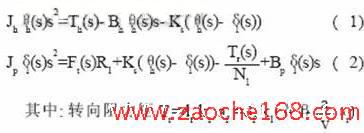
由图4的逻辑关系可得到:
5 建立电磁式助力转向系统的数学模型
控制系统中最常用的控制规律是PID控制,是一种线性控制方式。它将误差值的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,对被控对象进行控制。由于电磁式助力转向系统是一个有差系统,需要保持系统的静差,控制器中不能有积分环节。所以对电磁式助力转向系统采用比例加微
6 在Simulink中的仿真与分析
转向系统各参数如表3所示:利用表3的参数,应用Simulink对电磁式助力转向系统进行仿真。
为了验证控制系数对瞬态响应的影响,保持汽车整车底盘参数和电磁式助力转向系统参数不变,在车速为40km/h的情况下,取θh=1rad,调整Kp、Kd的取值,利用式(7)我们可以得到带有电磁式助力转向系统的汽车瞬态响应曲线,结果如图5所示。
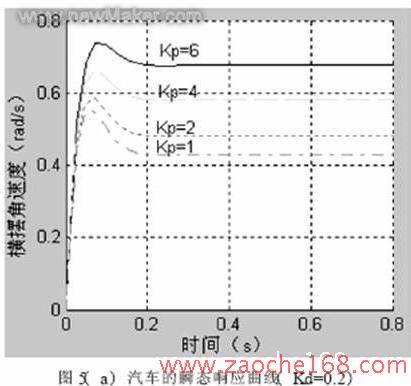
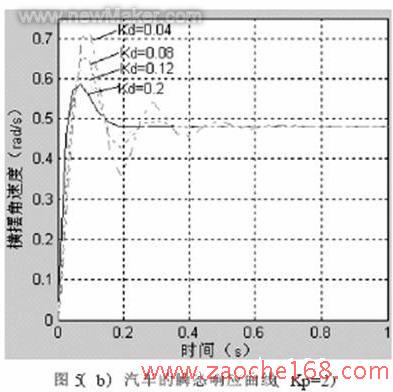
由图5(a)可以看出,当比例控制系数Kp减小时能很好的抑制系统的超调量;但是对系统的反应时间和稳定时间几乎没有任何影响;由图5(b)可以看出,Kd取较大值时,系统的超调量得到明显的抑制,且系统的反应时间和稳定时间均十分理想;但是随着Kd的减小,系统的反应时间增大,系统的阻尼系数逐渐变小,超调量增大,汽车的操纵稳定性明显的变坏。
7 结论
7.1 基于键合图理论的特点,可实现键合图到方框图模型的转换,利用Simulink与键合图模型相结合的方法,方便地得到了装配电磁式助力转向系统的车辆操纵稳定性的仿真结果,使仿真速度大大提高,同时还充分利用Simulink的可视化功能,实现汽车操纵稳定性的可视化仿真。
7.2 仿真结果表明电磁式助力系统确实能起到较好的助力作用;合适的选取PID控制的系数Kp和Kd,可以达到优化助力的作用。同时清楚的了解电磁式助力转向系统对车辆操纵稳定性的影响,方便了电磁式助力转向系统对车辆性能的改进的分析和研究。
(转载)

