
伺服可作为交流或直流电动机。早期一般伺服直流电动机,因为只有类型的控制大电流是通过序列多年。随着晶体管成为能够控制大电流和开关的大电流在更高的频率,交流伺服电机成为更经常地使用。早期伺服是专为伺服放大器。今天,一类是电机设计的应用,筹措,可能使用伺服放大器或变频控制器,这意味着电动机可用于伺服系统在一个应用程序,并使用变频驱动器在另一应用程序。有些公司还要求任何闭环系统,不使用步进电机伺服系统,所以它是可能的一个简单的交流感应电机是连接到一个速度控制器,被称为伺服电机。
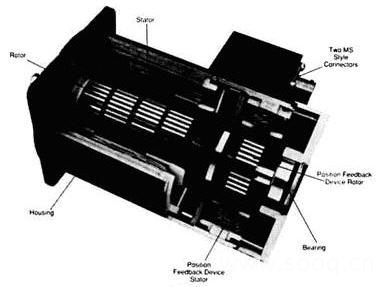
有些变化,必须作出任何运动,目的是作为伺服在cludes的能力,运作了一系列的速度没有过热,运作的能力在零速度和保持足够的转矩举行负荷的立场,运作能力在非常低的速度很长时间没有过热。老年型发动机冷却风扇已是直接连接到电机轴。当电机运行速度缓慢,风扇不会移动足够的空气冷却的发动机。较新的发动机有一个单独的风机安装,以便将提供最佳的冷却空气。这扇是由常数电压源,以便它反过来将在最大转速在任何时候都不管的速度伺服。其中最实用类型的电机伺服系统是永久磁铁(下午)型发动机。电压为外地绕组永磁型电机可以交流电压或直流电压。永磁型电机类似于其他类型电机下午以前提出。图11-83显示了剖图片的永磁电机和图。 11-84显示了剖图的永磁电机。从图片和图表可以看到住房,转子和定子都期待非常相似,前型永磁电动机。主要的差异这种类型的发动机,它可能减少齿轮能够将更大的负荷迅速从一个站着不动的位置。这种类型的永磁电机也有一个编码器或解析器内置马达的住房。这确保了设备将准确地表明了立场或速度的电机轴。

无刷伺服无刷伺服电机的目的是开展活动,刷子。这意味着,减刑的刷子提供现在必须以电子方式提供。电子减刑是由开关晶体管和关闭在适当时候。图11-85表明三个例子的电压和电流波形发送到无刷伺服电机。图11-86显示一个例子,这三个绕组的无刷伺服电机。主要的一点无刷servomo因子是,它可以采用任何交流电压或直流电压。
图11-85显示三种类型的电压波形,可用于功率无刷伺服电机。图11 - 85a显示了梯形电动势(电压)输入和方波电流输入。图11 - 85b显示波形的正弦输入电压和方波电流波形。图11 - 85C号显示了正弦输入波形和正弦电流波形。正弦输入和正弦电流波形是最受欢迎的电压用品的无刷伺服电机。
图11-86表明三套晶体管类似的晶体管输出级的变频驱动器。在图。11-86a晶体管相连的三个绕组电机以同样的方式在变频驱动器。在图。一升-86b图的波形的输出晶体管表现为三个不同的正弦波。波形的控制电路为基础,每一个transis器中显示图。11-86c。图11-86d表明了反电势的驱动波形。

图11-85 (一)陷阱ezoidal输入电压和方波电流波的形式。(二)正弦输入电压和正弦电压和方波输出电压波的形式。(三)正弦输入电压和sinusoi达电流波形。这已成为最流行的类型的无刷伺服控制。
伺服控制器
伺服控制器已成为不仅仅是放大器的伺服电机。今天,伺服控制器必须能够作出了一系列决定,并提供一种手段,接收信号来自外部传感器和控制系统中,并发出信号,主机控制器和PLC的接口,可能与伺服系统。图11-87显示了图片的几个伺服电机和放大器。各组成部分在这个图片看起来类似的各种其他类型的电机和控制器。
图11-88显示了图伺服控制器,以便您可以看到一些分歧与其他类型的电机控制器。该控制器在此图是直流伺服电机。该控制器有三个港口,使信号或发送信号的控制器。电源供应器,伺服电机,和转速表连接到端口P3底部的控制器。你可以看到,电源电压为115伏单相交流。一个主要的断开连接的一系列与李线。在李和N线路供电的隔离降压变压器。二次电压跨前可以是任何电压的20和85伏特。该控制器接地端8 。你应该记住,地面在这一点上是用来提供短路保护所有金属部件的系统。
该伺服电机连接到终端控制器在第4和第5 。终端5 +和终端4 -. 3号候机楼提供了地面的屏蔽的连接线,电机和控制器。在转速表连接到终端1和2 。 2号候机楼是+和终点站1 -.在此盾构电缆接地电动机案件。电线连接到这个港口将大于导线连接到其他港口,因为它们必须能够携带更大的电机电流。如果电动机采用了外置散热风扇,这将是连接通过这个港口。在大多数情况下,冷却风扇将采用单相或三相交流电压保持在恒定的水平,如110伏或240伏。
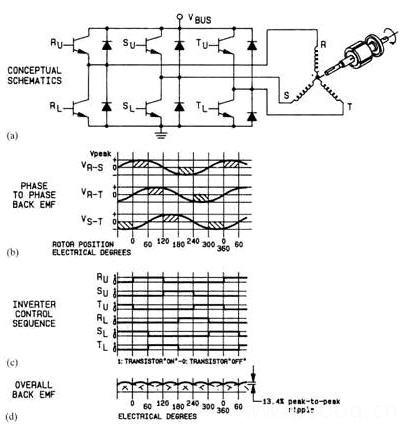
图11-86 (一)陈德良,sistors连接到三个绕组的无刷伺服电机。(二)波形的三个独立的电压,用于功率电机的三个风消息。(三)波形的信号用来控制晶体管序列,提供了波形图前,(四)波形的整体反电势。
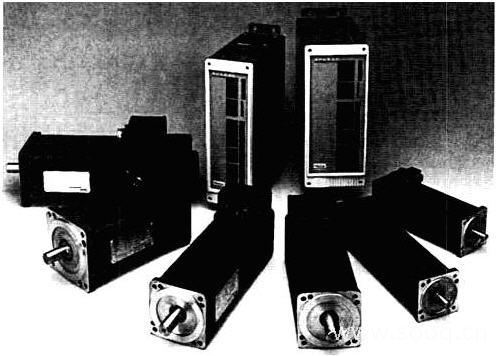
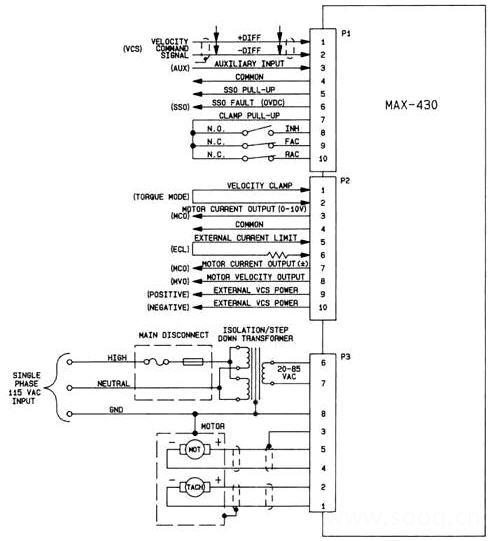
图11-88图的伺服控制器。此图显示的数字(开关)信号和模拟信号发送到控制器,以及信号控制器传送回主机控制器或PLC 。
该命令的信号被送到控制器通过港口有价证券投资。该终端的指挥信号的1和2 。 1号候机楼是+和终端2 -.这种信号是一种信号,这意味着它不是停飞或不同意的理由可能同任何其他部分的电路。一些额外的辅助信号也通过端口连接1 。这些信号包括抑制(异烟肼) ,这是用来停用驾驶从外部控制器,并正向和反向的命令(刚果和吸波涂层) ,其中向控制器发出电压电机,使之将在旋转向前或扭转方向化。在某些应用中,最大的旅行着限位开关和反向最大的旅行限位开关连接,如果旅行的机器动作的极端位置,以便它触及了overtravel限位开关,它会自动激发干劲,开始旅行相反的方向发展。
有价证券投资港口还提供了几个数字输出信号,可以用来发送故障信号或其他信息,如“驱动器运行”回到主控制器或PLC。港有价证券投资基本上是界面的全数字化(开关)信号。
港口的P2是界面的模拟( 0 -最大值)的信号。典型的信号,这车包括电机电流和电机速度信号,传送至伺服控制器到主机或公司,在这里他们可以用来验证逻辑,以确保控制器发出正确的信息的马达。输入信号从主机或PLC还可以被发送到控制器设置最大电流和速度的驱动器。在新的数字驱动器,这些值控制的驱动器参数,编程到驱动器。
PWM伺服放大器
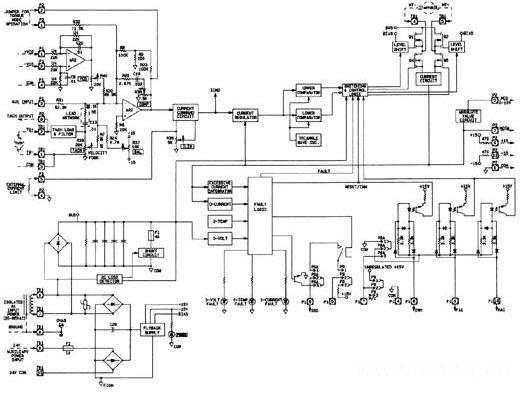
PWM伺服放大器是用来对小型伺服应用,使用直流电刷式伺服。图11-89显示了图这种类型的放大器。从图可以看到,单相AC电源是提供给放大器供应在左下角的一部分图。交流电压是整顿和发送到输出部分的驱动器,显示在右上角后起之秀的示意图。输出部分的驱动器使用的IGBT四个创建脉宽调制波形。该IGBT的是协商nected ,使他们提供30-120伏直流和高达30的刷式直流伺服电动机。极性的电机中所指出的图。
其余的电路显示了各种故障电路中的图表来自故障的逻辑电路板,并提供输出信号的底部图。你应该注意到,故障输出信号,包括过电压, overtempera结构和过。第四个信号是确定的SSO (系统状态输出),其中在dicates的地位,系统故障故障随时发生。跳投是用来确定信号的SSO作为一个开放集电极输出的逻辑电平“ 1 ”表明该驱动器已准备好,或者作为中继通常关闭显示驱动器已准备就绪。
输入终端右下角的一部分,图是用来启用或抑制驱动器,并选择了放大器钳(刚果)或反向放大器钳(吸波涂层) 。在抑制信号作为控制信号,因为它抑制了输出级的放大器,如果高。外交事务委员会和吸波涂层信号的限制目前在相反方向至5 % 。
输入信号显示在图左上方。风险投资(速度指令信号)需要一个+风险投资和一个风险投资的信号,提供差分信号。
应用伺服放大器和汽车
你将获得一个更好地了解和伺服放大器经营如果你看到一些典型的应用。图11-90显示一个例子马达来控制的新闻供稿。在这片材应用是馈入的记者在那里它是切断长度以刀刀片或纯粹的。片材可拥有一个标志或其他广告,必须排队登记号码的分界点。在此应用的速度和坡位置的片材必须同步进行正确的切点。反馈传感器可编码或解析器是加上光电传感器,以确定位置的登记标志。运营商提供的面板,使运营商可以慢跑的系统维护的刀片时,或当加载一个新推出的材料。在操作面板还可以用来调用参数,驱动器,肺心病,应对每类材料的使用。该系统还可以集成了可编程序控制器或其他类型的控制器和操作面板可以用来选择正确的临界点,每种类型的材料或产品运行。

一个例子伺服控制线瓶灌装的应用
第二次申请是在图所示。 11-91 。在本应用多个灌装头线与瓶因为他们沿着不断线。每个灌装头必须匹配了一个瓶子,瓶子轨道,而它正朝着。产品是作为配移动的喷嘴与瓶。在本应用10个喷嘴安装在一辆马车是驱动滚珠丝杠机制。在滚珠丝杠机制也称为丝杠。当电动机转动轴滚珠丝杠,马车将沿着横向的长度滚珠丝杠轴。这一运动将是顺利的,使每一个喷嘴可病pense产品的瓶子没有油污。
伺服驱动系统采用了定位驱动器控制器的软件,使位置和速度被跟踪的输送线移动瓶。主编码器跟踪瓶因为他们沿着输送线。一种螺旋式进料系统也使用之前的地步瓶进入加油站。螺旋导致具体数额的空间之间的规定,每瓶在进入加油站。该瓶可装紧紧他们的做法螺旋,但他们通过螺旋其空间是完全相同,使脖子的瓶子将符合生育间隔的灌装喷嘴。探测器还结合配药制度,以确保没有任何产品是免除从喷管一瓶,如果丢失或出现大空格之间瓶。
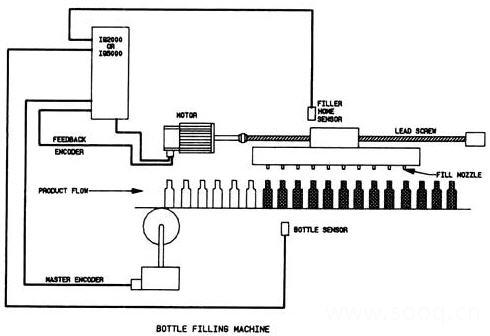
11-91应用图形化的饮料,加油站控制的伺服电机。
伺服驱动系统比较的立场瓶从主编码器的反馈信号,表明的立场,填补运输安装的滚珠丝杆。伺服驱动器放大器将增加或减少的速度滚珠丝杠机制,使喷嘴将匹配的速度瓶到底。
一个例子伺服控制精度螺旋充填系统
第三个申请伺服系统提供了图。 11-92 。在这一个大的应用填补坦克是用来填补他们的集装箱通过沿输送线。该材料是配药的集装箱可以是一个单一的材料补,也可以是几个队友,里亚尔增加一个集装箱是倒进搅拌机的混合操作。由于数额材料,配入集装箱必须准确地衡量和计量的方块中,一个螺旋是控制的伺服系统使用。反馈传感器,这一系统可以成为称重系统,如0782在先前讨论的章节。该命令的信号可以来自一个可编程序控制器或经营者可以在此输入手动选择一个配方从运营商的终端。数额玛材料可以从不同的配方食谱。

图11-92应用程序的一个精确的螺旋加油站控制的伺服电机。速度螺旋可以调整,以便它在运行的高速时,协商tainer将首先被填补,和速度可以放慢一点在最后克的材料可以准确计量容器填补适当点。由于材料价格的上升,精密灌装设备可以提供储蓄以及质量的数额使用的产品配方。
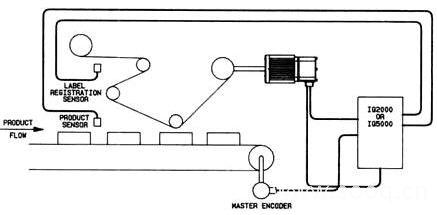
一个例子标签使用的应用伺服
第四个应用程序的伺服控制速度的标签饲料机制,拉预先标签进行了唱名,并将其应用于封装移动连续输送系统过去的标记机制。反馈信号提供的编码器,显示的位置输送带,环发生器,显示的速度输送,和一个传感器,显示的登记号码在每个标签。伺服定位系统是由一个微处理器,规定的错误信号,伺服放大器,功率信号提供的伺服电机。此应用程序图所示。11-93 。
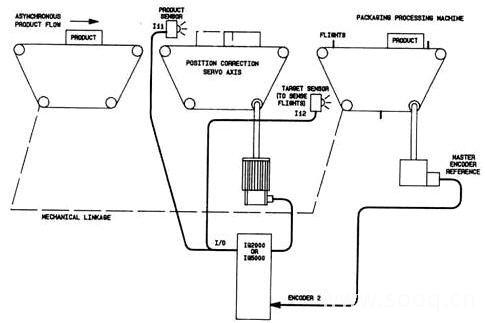
一个例子随机定时料控制系统由一个伺服
第五,提出申请图。11-94,显示了一系列的包装设备,可作为三个独立的机器。时间周期的每个车站的包装系统是独立于其他人。包装系统包括一个料输送机,输送定位和包装站。该料输送和包装机械站连接,使它们运行在相同的速度。的立场包的包装站必须严格控制,使包装不会成为太接近对方。一片金属所谓的飞行协商nected的包装输送站的具体点,以确保每包留在的位置。传感器安装在年初的定位,确定输送前缘包时,开始走上定位输送。第二个传感器是处于底部的传送带包装检测航班。这两个信号的传感器传送到马达,提供信息,以便伺服可以调整的速度定位输送,使每个包赞同之一的飞行动作,因为它的包装上传送带。此应用表明,该伺服定位控制器能够处理各种不同的信号,从多个传感器,因为该控制器采用微处理器。
(转载)




