
一、引言
转向系统作为汽车的一个重要组成部分,其性能的好坏将直接影响到汽车的转向特性、稳定性和行驶安全性。实践证明电动助力转向系统(EPS)具有节能、成本低和便于控制,易于装车,提高操纵稳定性和轻便性以及符合机电一体化的要求等优点,正迎合了时代的要求。自从1988年EPS在日本商业化以来,相继得到了国外各大汽车企业的大力开发和广泛应用,不仅用于微型汽车和小型汽车,还广泛应用于轻型汽车及普通型轿车上。国内近几年也得到了相当的重视,也有一些车辆(如昌河北斗星轿车)安装了进口EPS,但还没有自主知识产权的EPS进入市场,从几家研发的产品看出,这其中的因素有很多,特别是车辆在行驶中系统的故障在线监测、故障自诊断和安全防范,以及EPS装车后的行车安全性等方面还不能很好的得到保证。
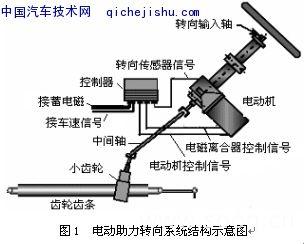
电动助力转向系统通常由转矩传感器、车速传感器、控制单元、电动机、电磁离合器和减速机构等组成(如图1)。其基本工作原理:转矩传感器测得的方向盘转矩信号和车速信号一同送给控制单元,经控制单元处理和计算以决定电动机助力电流的大小,然后通过电磁离合器和减速机构实现转向助力。
二、故障自诊断的基本原理
故障自诊断系统的作用是监测、诊断电子控制系统各传感器、执行器以及电子控制器(ECU)的工作是否正常。当ECU中某一电路超出规定范围的信号时,自诊断系统就判定该电路及相关的传感器或执行器发生故障,并控制故障指示灯闪烁,目前常用的故障代码指示有二种:一是以闪烁次数和时间长短表示不同故障,如三菱、现代、克莱斯勒、宝马等;二是不同颜色的几盏灯(一般为红、绿灯)闪烁表示不同故障,如本田、日产等。同时将故障信息以故障代码的形式存储到ECU内部的存储器中,然后ECU控制系统采取相应的安全防范措施。故障信息一旦被存储,即使故障已经排除且故障指示灯熄灭,仍将储存在存储器中。 消除故障码的方法有二:一是将保险丝盒中的保险丝拔下10S以上;二是将蓄电池搭铁线拆下10S以上。
三、电动助力转向系统故障自诊断
1 系统各组成部件的故障辨识
根据EPS系统控制线路(如图2),本文对EPS系统各组成部件进行如下故障诊断。
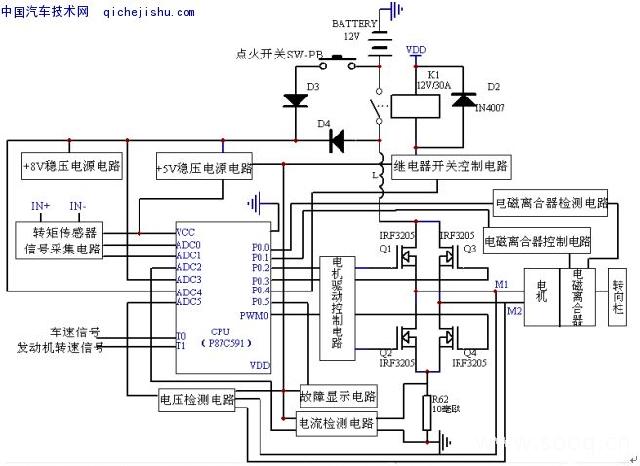
图2 EPS系统控制线路图
1.1转矩传感器故障自诊断
我们开发的电动助力转向系统应用的是摆臂式的转矩传感器。其工作原理相当于一个电位计,如图3所示,它具有双回路输出,即主扭矩(对应IN 端电压值)、副扭矩(对应IN-端电压值)输出,其主、副扭矩输出特性如图4所示,即当转矩传感器正常工作时,电位计的两个输出即主扭和副扭信号,理论上,正常工作范围在1V~4V,并且当转向盘处于中间位置时,转矩传感器的主扭和副扭的输出电压均为2.5V。一旦其本身及信号采集电路(如图5)出现异常,输入CPU(我们选用P87C591芯片为核心的8位微控制器,其本身自带有A/D转换器)的主、副扭矩信号将大于4V或小于1V或两信号之差超过3V。但实际车辆行驶中,虽然硬件和软件设计中考虑了各种抗干扰措施,各种偶尔的噪声或振动还是或多或少的会引起转矩信号的暂时偏差,而这种偏离是暂时的且系统能自动修复,故将转矩信号的异常界限值设为0.9V -4.1V,并且只有当信号值超出其范围持续一定时间(如30ms),才判定转矩传感器有故障,这样可以减少因其它外界原因而引起对转矩传感器故障的误判。
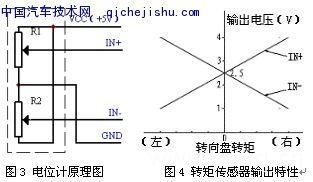
此外,转矩传感器的信号检测是建立在 5V的稳压电源基础上的,因此稳压电源电路的正常与否将直接影响到主、副扭矩信号。因此在检测转矩传感器主、副扭矩信号异常之前,首先判断转矩传感器电源电压是否在规定范围内。考虑到三端稳压集成块MC78T05在环境温度影响下其输出电压会有±0.1V的偏差,因此我们规定其正常输出电压为5±0.2V。如果CPU检测到电源电压异常,此时就跳过对转矩传感器信号的检测,这样可以避免对转矩传感器本身故障的误判。
通过信号值比较可以诊断如下传感器故障:
·主扭矩线路断开或短路
·主线路与辅线路输出电压差异过大
·转矩传感器电源电压过高或过低
·辅扭矩线路断开或短路
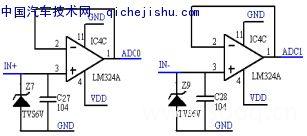
图5 主、副扭矩信号采集
1.2电机故障自诊断
转向助力大小是通过控制电机电流来实现,因此检测电机两端的实际控制电流就显得非常重要。电机电流采集电路(如图6),通过测量串联在驱动回路中的精密电阻R62两端的电压,经过信号放大和适当的电容滤波,然后通过ADC2端口反馈给CPU,此时程序设计将此电压与理论计算电压进行比较,如果两者悬殊过大;或者连续几分钟之内的平均电流消耗超过预先规定的数值,就判断电机及其线路有故障,以防止电机过载而烧坏或工作不稳定。其中我们选用的精密电阻值约7mΩ,这样和电动机电枢电阻168mΩ相比要小的多,因此基本不影响系统工作。
通过上述信号比较可以诊断如下电机故障:
·电机的控制电流过高,使电机出现过载而烧坏
·CPU计算的电机控制电流与实际检测的控制电流相差太大
·控制单元有控制电流传递给电机,但电机仍不能起动
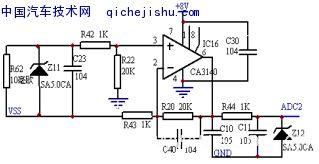
图6 电机电流采集
1.3车速和发动机转速信号故障自诊断
车速信号和发动机转速信号都是数字信号,因此不需要经过A/D转换,只需经过一定的整形电路,就可以直接送给CPU的定时器/计数器端口,然后通过计数器对波形的一定时间内的计数即可采集车速和发动机转速。如车速整形电路(如图7),车速信号通过一定的滤波和比较器比较,然后直接送给CPU的计数器T0。通过上述信号的采集,然后与相应工况的规定值比较,即可以诊断如下故障:
· 发动机起动后立即升到4000r/min或更高时,行车中持续60秒没有车速信号输入CPU
· 发动机在2500 r/min或更高速状态下运转时,行车中持续60秒没有车速信号输入CPU
· 发动机机起动后,无发动机速度信号输入CPU
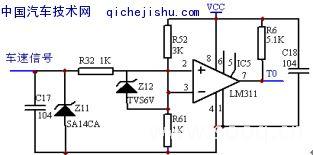
图7 车速整形电路
1.4电磁离合器故障自诊断
电磁离合器连接了助力电机和转向柱,它的分离与接合稳定与否将直接影响转向特性,因此系统工作时,其状态信号要及时反馈给CPU。电磁离合器状态信号采集电路如图8所示:当离合器处于接合状态时, P0.0端口输出高电平;反之,输出高电平。因此离合器线路断开或短路可以通过P0.0端口反应。
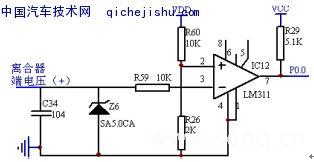
图8 电磁离合器状态信号采集
1.5控制单元电源线路故障自诊断
如图2所示:当点火开关闭合时,蓄电池电压将通过ADC4端口送给CPU,因此当ADC4 端检测的电压信号低于10V,程序设计就可以控制故障灯显示蓄电池电压太低。
1.6控制单元故障自诊断
控制单元主要由电子元件和软件组成,其本身不易出现故障。我们主要通过在硬件方面进行合理的布线和相应的滤波、抗干扰等措施来减少故障的发生;软件上通过使用看门狗技术、容错技术和设置软件陷阱等处理程序运行时的“跑飞”和 “死循环”等问题。
2. 故障代码显示控制及安全防范措施
当系统检测到各组成部件出现上述异常之一,且持续时间超过相应的规定值,程序设计就通过对P0.5端口间断的置0或1,故障显示控制电路(如图9)就控制发光二极管(故障灯)闪烁,其中闪烁的次数和延续的时间(各种故障代码)通过计数指针和延时子程序实现。如主扭矩信号出现异常,指示灯将显示故障代码号DTC11,如图10所示,亮1.5S,暗2S;再亮0.5S,暗3S,往复进行,直至故障排除,称“一长一短”。 故障显示的同时,程序设计也对P0.4和P0.1端口分别置1和0,经过电磁离合器控制电路(如图11)和继电器控制电路(如图12)使得电磁离合器和继电器同时被切断,以确保电机助力完全被切断,从而确保行车安全。
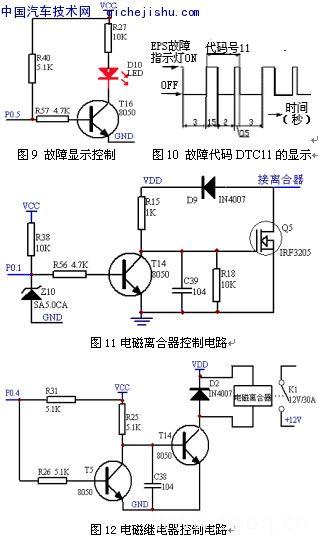
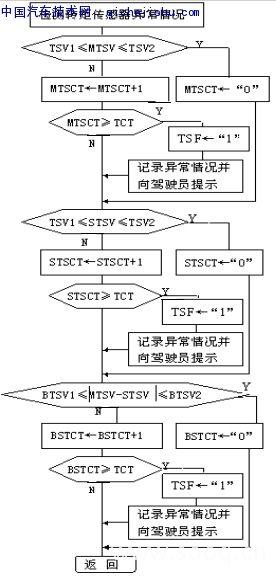
图13转矩传感器故障诊断流程
四、实例分析
转矩传感器故障诊断流程如图13所示:首先初始化时间延时计数指针、异常状态标志和各规定界限值(如表1),然后使主、副扭信号电压及其差分别与各自的界限值进行比较,如果超过界限值并持续时间超过30ms,那么将异常状态标志置1,记录异常情况并控制故障灯显示相应的故障代码,同时分别对P0.4和P0.1置1和0,以切断电磁离合器和继电器,从而切断电机助力。

表1 参数初始化
五、结束语
从上述的理论和实例分析看出:本文提出的EPS系统各信号间和信号与规定界限值间进行比较的故障诊断方法具有明显的简单、可行、容易与主控制程序协调设计和调试等特点。而且在试验台上我们通过人为设置各种故障(如短路、断路和接触不良等),然后观察故障灯显示情况,也显示了该比较自诊断方法具有明显的可行性。此外,虽然这种比较故障诊断方法是基于转向柱驱动(Column Drive)的电动助力转向系统(EPS)上研究的,但是其故障辨识的基本原理具有广泛的通用性,因此该故障自诊断系统设计思想同样也适用于小齿轮驱动(Pinion Drive)、齿条驱动(Rack drive)的EPS和其它的电控系统。
(转载)

