
来源:
随着城市环境污染问题的日益严重,汽车尾气的控制越来越受到人们的重视,很多国家都开展了电动汽车的研究。但是电动汽车存在续驶里程短、动力性能差等弱点,加之成本太高,目前还无法大批量投入市场。为了兼顾传统燃油汽车和电动汽车的优点,国内外都开始进行混合动力汽车的研究。
当今汽车的保有量和使用量的飞速增加使得大气环境污染问题日益严重,加上石油资源危机,使得以电能作为驱动的汽车技术成为世界各汽车厂商技术竞争的热点。但是电动汽车的产业化还处于初期的准备阶段,与之相关的技术和产品尚未形成工业体系。在这一新的领域我国与国外处于相近的水平,为此科技部在十·五“863”计划专门设立了电动汽车重大专项,以进一步推动电动汽车的产业化,实现我国汽车工业的跨越式发展。
现代汽车工业和电子技术飞速发展,汽车上的电子装置越来越多。一辆高档汽车的电气节点数已达上千个,如果采用传统的方法进行布线,连线的数量非常惊人而且有极大的故障隐患。为了解决这一问题,各大汽车厂商从上世纪70年代开始了车用网络的研究,并取得了很大的发展,形成了多种适合不同传输速率及特殊用途的网络协议,如:CAN总线、LIN总线、用于诊断的KWP2000、用于X-by-wire 的TTP、多媒体应用的MOST协议等。其中CAN(Controller Area Network,控制器局域网)是BOSCH公司于上世纪80年代提出的。为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,可以很好的解决上述的问题。现在世界上许多汽车公司,如奔驰、宝马、大众等公司已采用CAN总线来实现汽车内部的数据通信。
我国对车用网络、总线、通讯协议的研究起步比较晚,但近年来发展比较快,尤其在电动汽车项目中总线网络得到广泛的应用。
由于混合动力汽车有两套驱动系统,驱动系统与整车控制单元(VCU)之间的信息交换与协调就显得尤其重要。CAN(Controller Area Network)总线即控制器局域网络,是一种有效支持分布式控制或实时控制的串行通信网络,属于现场总线的范畴,具有实时性强、可靠性高、抗干扰性强、结构简单、操作性好、价格低廉等特点,因此被广泛用于工业控制中。
电动汽车电机控制器
直流电机调速器采用PWM脉冲调制技术,对直流电动车进行无级调速。有欠压、过流等常规保护.有带逆转和不带逆转的二种规格。主要应用以电瓶为动力源的电动汽车、电动游览车、电动高尔夫球车、叉车行走、旅游车、搬运车、多用途车、堆垛车的电机进行转矩及速度控制,控制直流串励(它励)电机或永磁电机。电阻调速和模拟控制串励电机调速的更新换代产品。电压范围12V-120V, 输出功率范围0.20-25KW,其中无刷电机调速器输出功率范围0.20-10KW.有高电位低电位刹车多种形式,有正反转功能,有欠压保护,过流保护,堵转保护,换向角60°/120°通用。重量;0.8- 4 kg,外形尺寸; 150-350 × 100 × 55mm.也供应DC-DC转换器和与控制器配套的电机逆转器。包括电机和电动车全部方案设计。
总线控制驱动
混合动力电动汽车总成控制系统,测速单元的速度信号传送给主控制器,主控制器的控制信号经驱动模块、充电器传送给蓄电池,主控制器的控制信号通过温度控制器传送给蓄电池,蓄电池的电压、电流、温度信号通过检测模块传送给主控制器,设定单元的设定信号传送给主控制器,CAN外总线的数据信号端与主控制器相互连接,主控制器的控制信号经数模模块传送给变频器,变频器的频率信号传送给电动机,电动汽车总成控制系统按工作流程步骤工作,本发明具有电路简单,可靠性强,智能化程度高,运行稳定,反应快速等优点,能满足混合动力电动汽车速度自动控制、节省能源和促进混合动力电动汽车普及推广的需要。
纯电动汽车采用电机代替传统的发动机,因此电机控制子系统与CAN,总线上的节点的通讯就显得十分重要。
1 CAN节点的硬件设计
当今的电机控制已经进入到全数字控制阶段,本设计选用TI公司的DSPTMS320LF2407作为电机控制器。TMS320LF2407是一种低成本、低功耗、高性能的处理器,其执行速度达到30 MIPS,指令周期缩短到33 ns;有两个事件管理模块,可实现PWM的对称和非对称波形,可编程的PWM死区控制等专门应用于电机的数字化控制的设计。同时TMS320LF2407还集成CAN控制器模块。集成的CAN控制器有以下特性:完全支持CAN2.0B协议,支持标准和扩展标识符;有6个邮箱,其数据长度为0-8个字节,2个接收2个发送,2个可以配置为接收或发送;有15个16位控制寄存器,控制CAN的位定时器、邮箱的发送和接收使能、错误状态及中断等;当发送出现错误或仲裁时丢失数据,CAN控制器有自动重发功能等。
2 CAN节点的软件设计
CAN2.0B中规定,有两种不同的帧格式:含有11位标识符的帧为标准帧;含有29位标识符的帧为扩展帧。CAN节点间传输的报文有4种不同类型的帧:(U数据帧(DataFrame),将数据发送到CAN,总线上,供其它节点接收;②远程帧(RemoteFrame),节点发出远程帧,请求发送具有同一标识符的数据帧;③错误帧(ErrorFrame),任何节点检测到总线错误时发出错误帧;④过载帧(Overload Frame),在相邻数据帧和远程帧之间提供附加的延时。其中数据帧和远程帧可以使用上述两种帧格式。
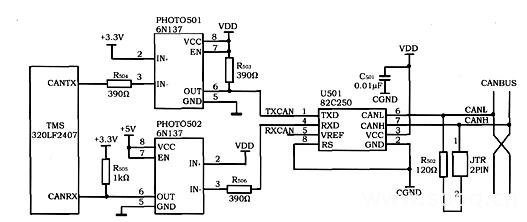
图1 TMS320LF2407的CAN节点接口电路
由于CAN总线符合ISO/OSI参考模型,但只规定了物理层和数据链路层的协议,用户需自己开发应用层协议。需根据整车的应用层协议规定CAN帧的标识符和数据域的含义。本系统中采用的是扩展帧格式,在汽车的主控制器和电机控制器间共有8种不同类型的数据,也就有8种不同的标识符,分别是主控制器发给电机控制器的电机控制指令、驾驶需求、制动、故障信号;电机控制器发给主控制器的电机状态1(转速、转矩)、电机状态2(电流、电压)、电机状态3(电机温度)、电机故障信号。由应用层协议来决定CAN控制器发送和接收的帧格式。
TMS320LF2407的CAN控制器模块包括6个邮箱,每个邮箱由邮箱标识寄存器、邮箱控制寄存器、4x16位的存储空间组成。在对CAN控制器进行操作前,对位定时器和邮箱进行初始化,本系统将邮箱3配置为发送邮箱,邮箱2配置为接收邮箱;发送用查询的方式,接收采用中断方式。图2为CAN初始化程序框图。
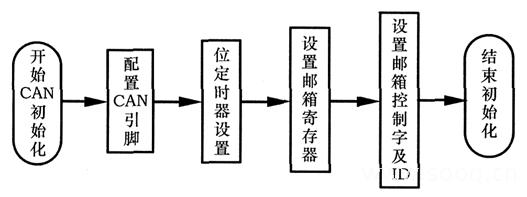
图2 CAN初始化程序框图
根据系统应用层协议的规定对CAN控制器初始化后,电机控制器即可与CAN,总线上的其它节点进行通讯。当主控制器需要给电机控制器发送指令时,主控制器要保证发送指令的数据帧ID与电机控制器的ID一致。电机控制器检测到总线上有数据时,比较总线上数据帧ID与自身的ID,如一致则接收该数据帧,如不一致则不接收,从而保证数据帧能够正确传送到目的节点,而其它非目的节点不会接收。电机控制器正确接收到主控制器的数据帧后,分析数据帧的数据域数据,解析出控制命令,即由应用层协议判断控制信号,由控制器实现对电机的控制。同样,电机控制器可以将状态信息传给主控制器和总线上的其它节点,每个节点只接收ID与自身ID一致的数据帧。这样电机控制系统与CAN总线上其它节点之间就可以方便地实现通讯。
由于CAN总线的应用实现了车身各子系统之间的资源共享,就可根据智能化的要求和综合协调控制的特点组成一个协调控制的综合系统,全面提高汽车的整体性能。
(转载)

