
织物在练漂和印染过程中,由于经受很多次机械的经向拉力作用,使织物经向伸长,纬向收缩,产生如幅宽不匀、布边不齐、纬纱歪斜等现象。为了克服上述缺点,织物必须经过拉幅整理。拉幅整理是根据棉纤维在潮湿状态下具有一定可塑性的特性,在干燥过程中,调整经纬纱在织物中的状态,将织物门幅拉至规定尺寸,达到形态稳定的效果。
针铗链式拉幅定型机是实现拉幅功能的机械,它由进布架、轧车、整纬装置、烘筒,热风烘及落布架组成。工作时,定型机夹住布边逐渐拉宽,并缓缓的干燥,从而获得暂时的定型。主传动部分由主从两根链条组成,要求它们位置高度同步,稳定运行时的纬斜在5mm之内,动态加减速过程可在40mm之内,但稳定运行时应立即消除,且不能有累计误差。以前的方案使用机械同步,结构复杂,部件多,成本高,安装难度大,维护成本高,运行起来噪音也很大,现在较流行的是使用高档PLC+变频器的控制方式,主从链分别由两台交流异步电机来驱动,在机械上不加任何连接,由PLC测量位置偏差并计算输出频率来分别控制两台变频器以达到位置同步。该方案的主要缺点是PLC需配置高速计数模块,编写控制位置同步的程序难度高,使得系统成本高、开发周期长,并且通讯控制有延时使得系统的响应速度一般。本文介绍一种使用SB80B变频器实现主从两根链条的位置同步而不需外加任何位置同步控制设备的方案。
2 森兰SB80B变频器简介
SB80B变频器是森兰变频器制造有限公司自主开发的新一代低噪声、高性能、多功能的工程型矢量控制变频器。它应用极其广泛,这主要得利于它的模块化设计及多种选配件,模块有两个层次:通用功能模块,如PID控制、多段频率、自动节能运行等;行业专用功能模块,如位置控制,纺织应用、恒压供水应用等。它还具有丰富的可编程模块,功能非常完整,编程灵活方便,包括:两个多功能比较器、两个逻辑单元、两个定时器、一个计数器(高速计数方式可对高达300kHz的脉冲信号进行计数)、四个算术单元和一个低通滤波器。用户可以根据所需对SB80B的资源进行编程,既可以利用它的可编程功能模块来配合专用功能模块的使用,也可以和通用功能模块配合来实现更多行业的更广泛的功能。
SB80B的高速计数方式可对从脉冲编码器接口进来的脉冲信号进行计数,其中从A通道进入的脉冲为增信号,B通道进入的脉冲为减信号,计数器的计数值和计数偏差可以通过功能码查询。
SB80B还内置功能完备的过程PID,除了完成常规的闭环控制外,还可把PID的输出加在变频器的输出频率上实现对频率的实时修正,这在很多闭环控制场合必不可少。PID的输入和反馈通道有很多种选择,反馈信号还可以设置为模拟量的多种运算结果。
3 系统设计
考虑到不能有位置累计误差的要求,故即使非常精确的速度控制也无法满足要求。我们必须把位置作为一个反馈信号来控制变频器,才能达到消除累计误差的目的。因此,需在主从电机的传动装置上都装脉冲编码器,利用SB80B的高速计数器来对编码器的脉冲进行计数,以达到记录当前位置偏差的目的。使用两台变频器分别驱动主从两台电机,主变频器无特殊要求,只需开环运行,从变频器采用SB80B,它的PID修正频率功能可以根据得到的位置偏差不停的修正输出频率,以达到位置同步。
需要注意的是,主从传动装置的脉冲编码器的每转脉冲数必须相等,否则主从链每个脉冲代表的位置量不同,将无法实现同步控制。
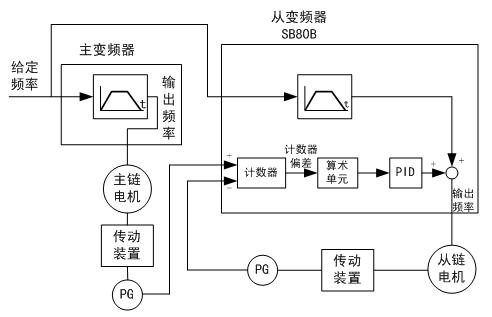
下图为利用SB80B实现位置同步的实现原理图:
在拉幅定型机传动系统的其他部分需要和主传动速度成一定比例变化,这可以外加一个普通PLC计算后由通讯给定。下图是我们的系统实现框图:
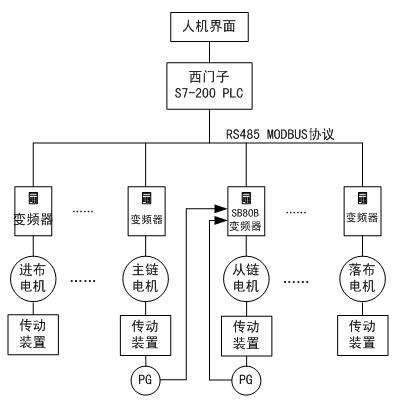
人机界面是输入系统控制参数的设备,PLC根据人机界面设置的参数通过串行口把控制命令发送给各变频器,如主链给定速度,控制命令等;两台变频器分别驱动主从链上的两台电机,主变频器使用开环VF控制,主电机的传动装置接PG,PG信号的A相接在从变频器的编码器接口的A-端子上;从变频器也使用开环VF控制,并选择PID作速度修正,从电机的传动装置的PG信号的A相接在从变频器的编码器接口的B-端子上。激活高速计数器功能,这样,如果主链速度比从链速度快,计数器值增加,反之减少。计数偏差代表两根链条的位置累计误差,若偏差大于0,表示主链的位置超前,反之表示主链的位置滞后。计数偏差经过算术单元处理后作为PID的反馈量输入(PID给定量设为0,意为调整的目标是没有位置偏差),经过PID调节后加在从变频器的输出频率上。系统其他部分的电机的运行频率由PLC根据主变频器的输出频率计算得到。
4 运行调试
主变频器的参数设置较简单,在此只列出从变频器需要修改的参数设置,如下表所示:

调试步骤如下:
(1)首先确保接线无误,主从电机的转动方向一致;
(2)为了获得更好的控制性能,分别对主从电机进行一次电机参数自整定,具体步骤请参见SB80B的用户手册;
(3)给出运行命令,观察PU-19(计数器偏差,表示位置偏差),调节F6-06(PID的比例增益1)和F6-07(PID的积分时间1)至一个合适的值,使得PU-19的值最稳定,且保持在0左右。参数调节不适当,易产生位置超调或响应太慢,很难达到理想的控制效果,实际的位置可能会不停的在超前和滞后之间振荡,也可能始终有一个静差无法消除。设传动装置每旋转一圈链条走动1米,主从传动装置上的脉冲编码器均为1000脉冲/转,CL-27设为10000时,则PU-19偏差为0.01%代表实际的位置偏差为主链超前(0.01%×10000÷1000脉冲/转÷1圈/米)=1毫米。实际系统经我们多次调整PI参数后,稳定运行时的误差在3mm以内,加减速和急停时的误差在8mm以内,且能实时修正,精度超过了先前的方案和用户的期望,用户非常满意。
5 总结
本方案仅用变频器就实现了高精度的位置同步控制,与该系统以前使用的高档PLC+变频器的方案相比,有以下优点:
(1)开发难度很低,只需设置变频器功能码,无需为PLC增加高速计数模块并编写复杂的PLC控制程序;
(2)修正是直接在从变频器中完成的,故控制延时小、响应速度快,修正精度高、效果好;
(3)成本低。实现同步只需要使用SB80B变频器,若要实现整个系统,只需购买一个具备通讯功能的普通性能的PLC即可,无需配置高速计数模块;
可见,在拉幅定型机上使用SB80B变频器,精度高成本低,系统组成简单,工作稳定可靠。
参考文献
[1> 森兰变频器制造有限公司,森兰SB80B用户手册,2005
[2> 王菊生等,染整工艺原理,北京:纺织工业出版社,1982
[3> 周宏湘,高理敏编,染整新技术问答,北京:中国纺织出版社,1998

