
汽车上可自动关闭的电动车窗或车门设备潜藏着卡死,挤压以及可能伤人的危险。它们必须能够反向移动以防止马达所施加的力超出正常限制。这种特性意味着必须持续监视速度、电流和玻璃的位置。
由于成本和简化的原因,本文所描述的系统使用普通的带有霍尔效应传感器的刷式马达。基于速度和扭矩导数的检测算法已通过健壮性和容错性的验证。该算法可用于所有带有A/D 转换器和通过变化引发中断的I/O 口的AtmelAVR Flash 微控制器。本文描述的是基本原理,Atmel网站上的应用笔记有关于实现的详细描述。
现代汽车中的电动设备
目前,在高端客用汽车中电子组件和系统在成本中已占20%以上。增加电子设备的数目可以更好的控制传感器和致动器,从而增强汽车的舒适性和安全性。可以预测,大部分的中等或高级汽车将会系统性的装备电动车窗或车门系统。这些设备中的绝大多数是全自动的,这意味着它们必须附带安全系统以防止伤人或机械故障。已有法规设立了电动系统必须遵守的规则。这一点在车窗的升起和车门的滑动上尤其正确的。这篇应用笔记介绍了如何实现一个防夹算法,该算法最初是用于电动车窗系统,但可以轻易地移植到其它可移动设备中。
标准
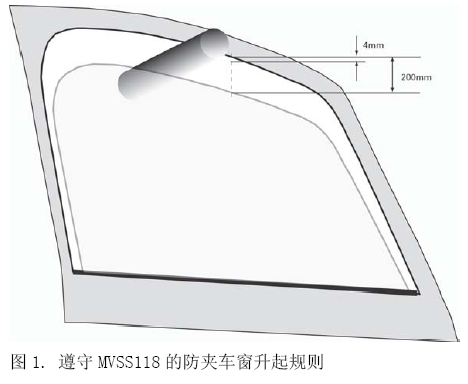
汽车电动车窗受国际标准的约束,如美国的MVSS118 或欧洲的74/60/EEC。在如何降低对儿童的危险度方面,这些文档所提出的要求如下:检测区域:4mm 至200mm;最大夹物力为100N;夹住时可以反向;确定偏转角测试:5N/mm 至 20N/mm。
关于硬件
对于确定关键夹物区是否有障碍物进入的不同检测策略有:
(1)无机械接触。在夹物力施加至物体上之前就有反应。因为没有外力施加在物体上,这是最优的保护方式。它还不依赖于振动、空气动力学变化或变形。但该方法要求有集成的传感器(红外、超声波,等等)以及相关的电路模块和线路,从而导致附加成本。
(2)有机械接触。所测到的压力传递给系统用于指示有物体被夹住。在这方面,设计者还有两种基本的技术可用:方向测量(力学传感器或接触器集成进车门密封中,这些解决方案成本一直都很高并限制了车窗/车门的样式设计),或者通过物理监测的无方向测量(这是一种整体成本上最优的解决方案)。
防夹算法详述
夹物检测算法一开始就要符合标准(FMVSS118 & 74/60/EEC)的要求:检测区域为4 至200 毫米;最在施加力100 牛;夹住物体时反转方向;标准的确认性测试。
必须要自适合的原因包括:– 提升系统中的机械部分将会随着时间而变化(老化、局部变形、磨损,等等);– 电子特性会有很大的变化;– 环境对磨擦力的影响(温度、湿度、结冰等);系统不应对扰动和不正确的夹物检测有反应。对于空气的磨擦、道路的振动、断电等都必须是健壮的。
使用马达的解决方案的物理参数
必须可以通过马达的电流算出施加在玻璃上的力。在速度方面可以持续提供移动部件的位置信息。这些参数都可以用于确定是否遇到物体以及:该物体是否在检测区;所施加的力是否超限。
本文描述了一种防夹算法,该算法通过测量电机电流和霍尔效应速度指示器来工作。只须很少的改动,就可以将该算法用于象滑动车门或蓬顶这样的系统中。
夹物检测算法
一般情况下,夹物检测算法的运行是通过间接测量车窗提升系统的,包括电流(扭矩)和位置(速度)。与算法相关的应用笔记采用了两种技术,它们是基于:
– 存贮在无冲突内存中的校准扭矩:执行初步学习顺序,将扭矩值存贮在内存中。这种技术很耗费内存,并要求规定校准顺序。
– 速度推导计算:很有意义的一种技术,因为它对内存要求较少,但需要更多的计算,具有两种方法的优点。
在AVR上的实现
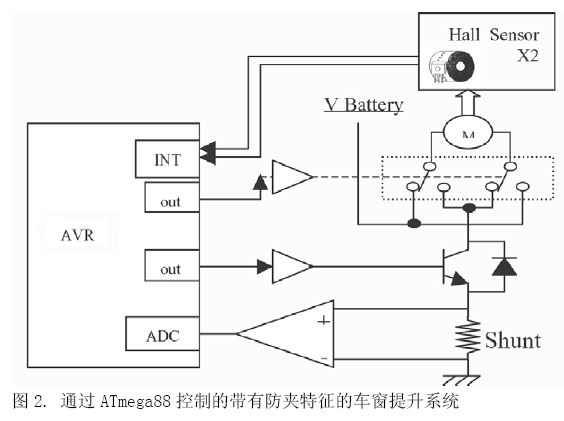
前几段详细描述的算法已经实现,并在一块AVR ATmega88 开发板上进行了测试。图2 描述的是用以实现算法的硬件。它采用了一块标准的ATmega88 以及模拟链来测量电机电流。硬件带有两个霍尔效应传感器。马达的方向是通过一个两极延迟来控制的,并通过一个场效应管来激活马达的开关。
系统内编程Flash
系统内编程允许任何位于端系统内的AVR 微控制器进行编程和再编程。通过一个简单的三线SPI 接口,系统内编程器与AVR 微控制器进行串行通讯,从而重编程芯片上的所有非易失性内存。系统内编程无须将芯片从系统中物理上拿出。这样无论是在实验室的开发阶段,还是现场的软件或参数的升级,均可以节约时间和资金。在最终产品阶段将代码上传进Flash 存储器中时,在多个应用和自定义版本中使用同一个标准的AVR Flash 微控制器可以简化总量管理。
软件描述
所有代码使用IAR EWAVR 4.1 以C 语言方式实现。基本功能(位置管理、初始化、电流管理、车窗操作、防夹监测)的实现需要2KB Flash。增加扩展功能象校准、阻塞点的检测和存储,可将代码大小扩展至4KB。软件代码可在Atmel的网站中获得,其结构如下:
初始化脚通过一个霍尔效应传感器(对信号沿的升起和下降敏感)改变所要用的中断。它还初始化用于测量速度和马达电流的时钟和ACD。
这个函数从EEPROM 或以初始值方式加载车窗提升参数,以初始化车窗提升器。这些参数包括车窗的大小、传感器值、夹物阈值、夹物区域、已知的最后的位置,等等。如果在位置参数上是一个缺省值,它能够请求一个下降的命令在底端限制值上初始化车窗提升器。
这个函数是将车窗提升参数存进EEPROM。
这个函数包含了车窗提升状态机。它通过已有的事件参数控制车窗的操作。监视车窗的位置、上升和下降端的限制以及防夹系统的状态。返回车窗提升器的状态(与get_window_state 函数的值相同)。
这个中断子例和在霍尔传感器沿执行。它计算滚动方向、位置、推导速度和马达电流参考值。通过计算连续的方向变化,它还能够检测出霍尔效应传感器的缺省值(传感器没有连接至一个中断脚上)。
这个函数强制车窗在一个定义好的步骤后停下来。该函数返回车窗提升状态机的状态(这个返回值用于window_ctrl 函数中)。
建立车窗提升状态:用于强制性操作中(如停止请求…)
计算最后8 个采样点的均值。用于过滤马达电流。
这个函数监视启动按钮,产生操作命令事件并传递给window_ctrl 函数。
(转载)

